Emergente
Unitree · Cina
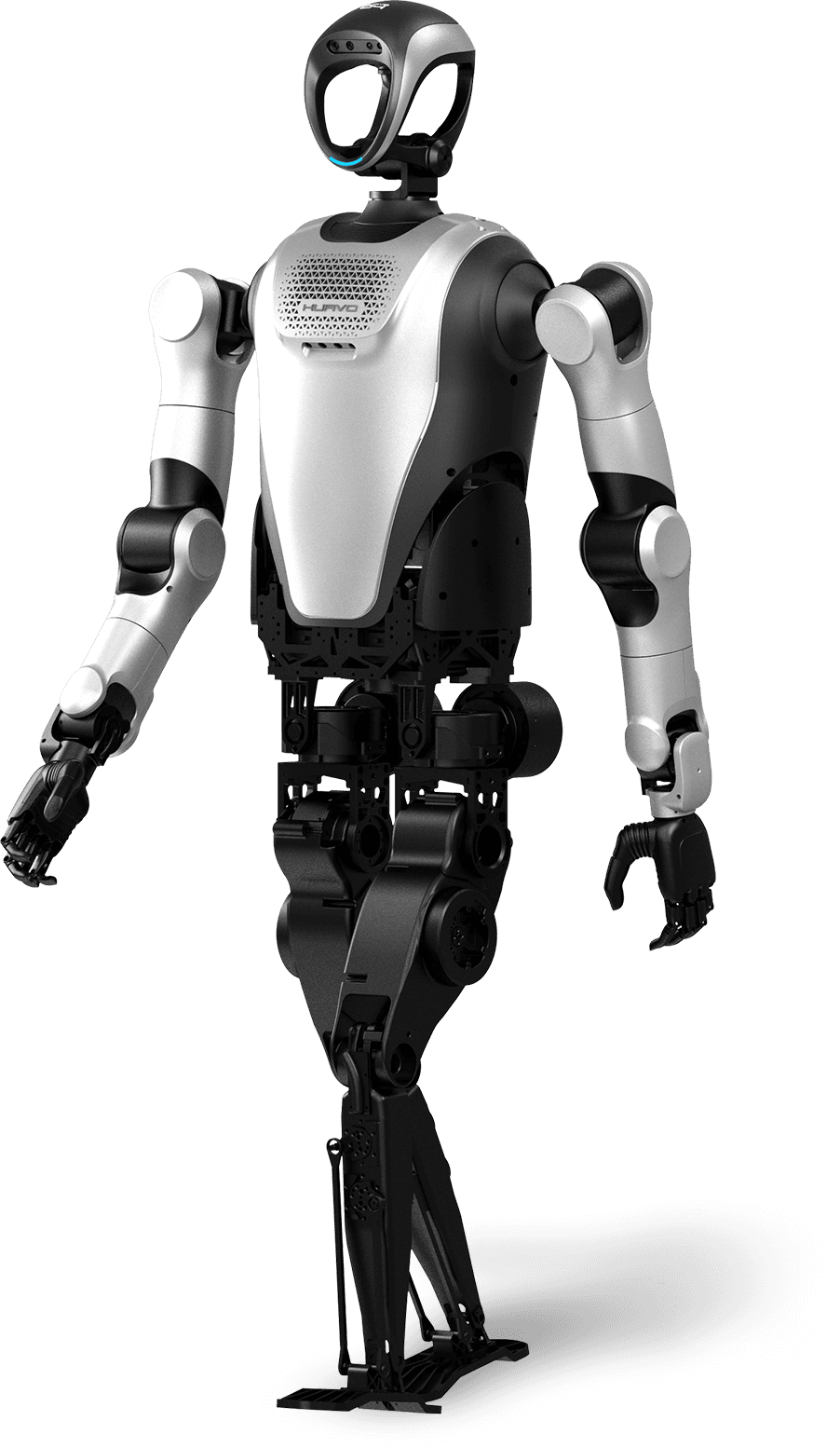
H1
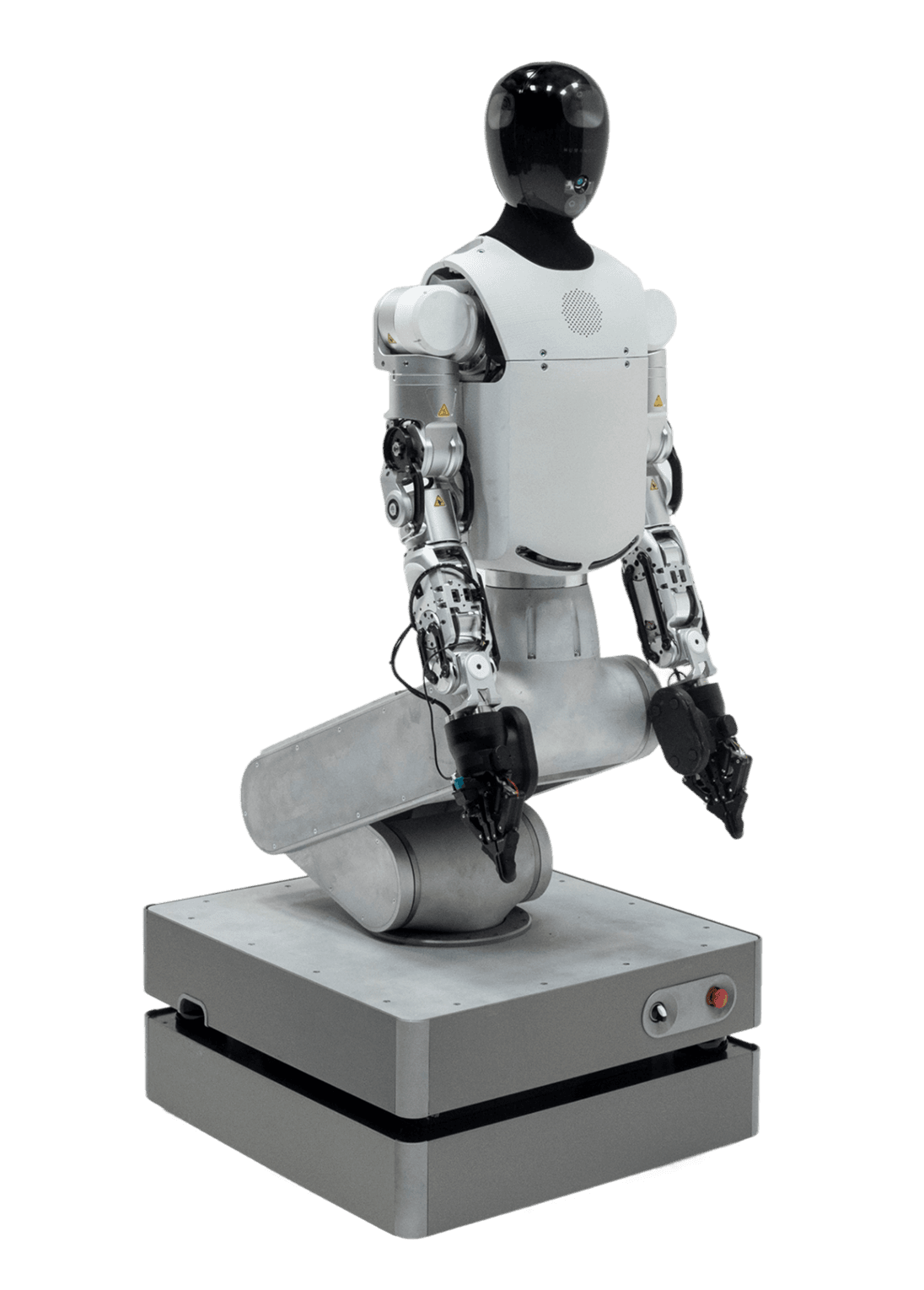
180 cm19 DOF30 kgda 84.000 €
ManipolazioneMovimentazione internaMansioni generali
19 DOF, 30 kg payload, record velocità umanoide 3,3 m/s; in commercio ma uso principalmente R&D e pilota industriale.
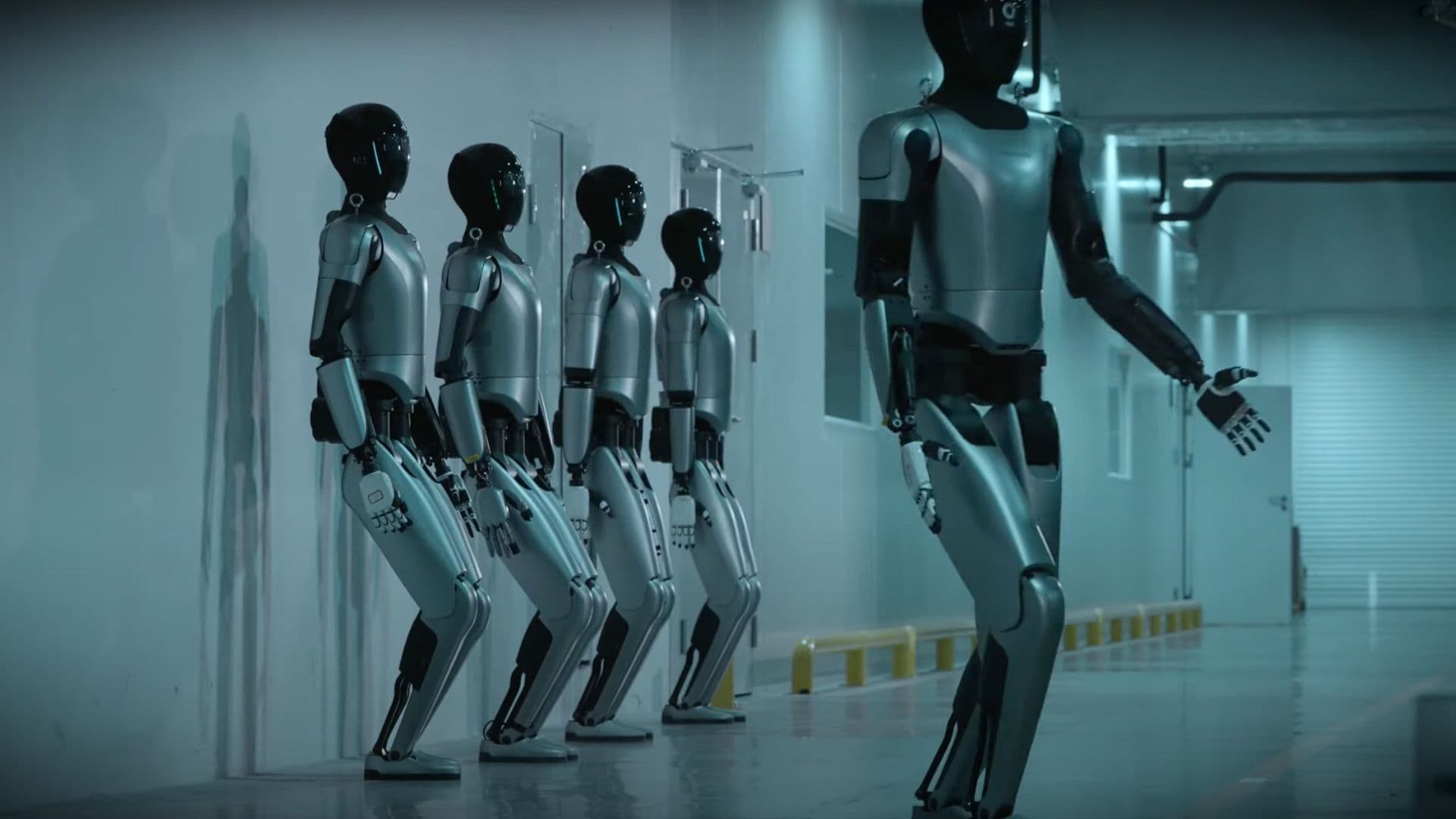
325 modelli a confronto — dai pilota industriali (Figure, Apptronik, UBTech, Tesla) ai bipedi consumer. Tecnologia emergente: early-access e pilota, non ancora forza lavoro continua. Qui li scopri, li capisci e li metti a confronto.
Scorri i robot umanoidi più avanzati al mondo: ogni swipe insegna al finder cosa mostrarti. Aggiungi al confronto quelli che vuoi valutare — è una scelta tua, non un gioco.
28 DOF, 25 kg payload, in pilota BMW 2024-2025; early-access non venduto pubblicamente.
Trascina la card, usa i pulsanti o le frecce ← →
Tecnologia emergente: oggi pilota e early-access, domani forza lavoro generalista. Non sostituiscono i cobot per compiti specifici — aprono scenari nuovi dove la forma umana è un vantaggio.
28 DOF, 25 kg payload, in pilota BMW 2024-2025; early-access non venduto pubblicamente.
23 DOF, payload 2 kg (mani leggere), prezzo entry-level $16k; disponibile in vendita ma più adatto a R&D che a uso industriale pesante.

19 DOF, 30 kg payload, record velocità umanoide 3,3 m/s; in commercio ma uso principalmente R&D e pilota industriale.

25 kg payload, in pilota con Mercedes-Benz 2024; partnership Google/Jabil per scaling.
16 DOF, 16 kg payload, deployato in pilota Amazon 2024; primo umanoide in produzione commerciale (RoboFab, Salem OR).
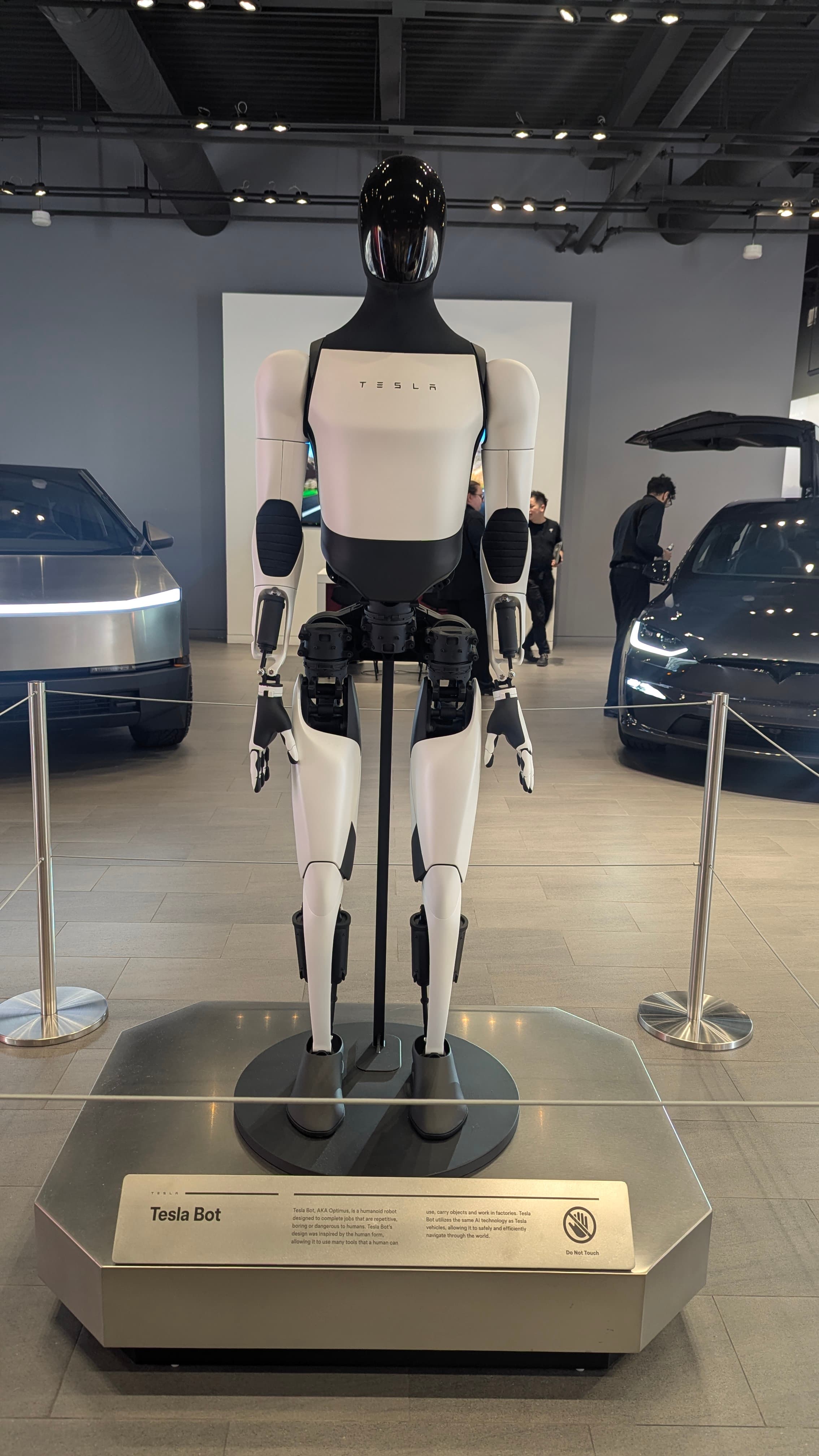
28 DOF, 20 kg payload, in uso interno negli stabilimenti Tesla (Fremont, Austin) per sorting batterie.
40 DOF, 50 kg payload, deployato in ospedali cinesi e fabbriche automotive europee.
56 DOF, 50 kg payload, prima versione completamente elettrica (2024); collaborazione pilota con Hyundai.
25 kg payload, pre-order aperti a $20k (early access 2025); progettato per ambienti domestici/servizi, non industriale pesante.
41 DOF, ~15 kg payload; pilot in fabbriche cinesi (BYD, Foxconn, Zeekr) 2024-2025 su asservimento linea, sorting e ispezione.

~25 kg payload, mani tra le più destre del settore (manipolazione fine task-by-task); pilot in retail e logistica.
62 DOF, mani antropomorfe; schierato nelle linee di assemblaggio EV di XPeng dal 2024.

53 DOF, evoluzione del GR-1; piattaforma aperta per ricerca e servizi, eredità Fourier nella robotica riabilitativa.

52 DOF, posizionamento commerciale a costo contenuto rispetto ai concorrenti USA; mira a logistica, ispezione e mansioni generali.

Umanoide bipede full-size: 31 DOF, 182 cm, ~70 kg, ~7 kg payload per braccio (15 kg picco).

Umanoide compatto entry-level: 26 DOF, 121 cm, ~25 kg.
Versione developer del G1: 23-41 DOF, ~127 cm, payload ~3 kg, Jetson Orin, SDK e ROS 2, mani a 5 dita nelle versioni top.
Umanoide industriale: 176 cm, ~70 kg, fino a 15 kg a due braccia, ~2 m/s, battery swap autonomo per 24/7.

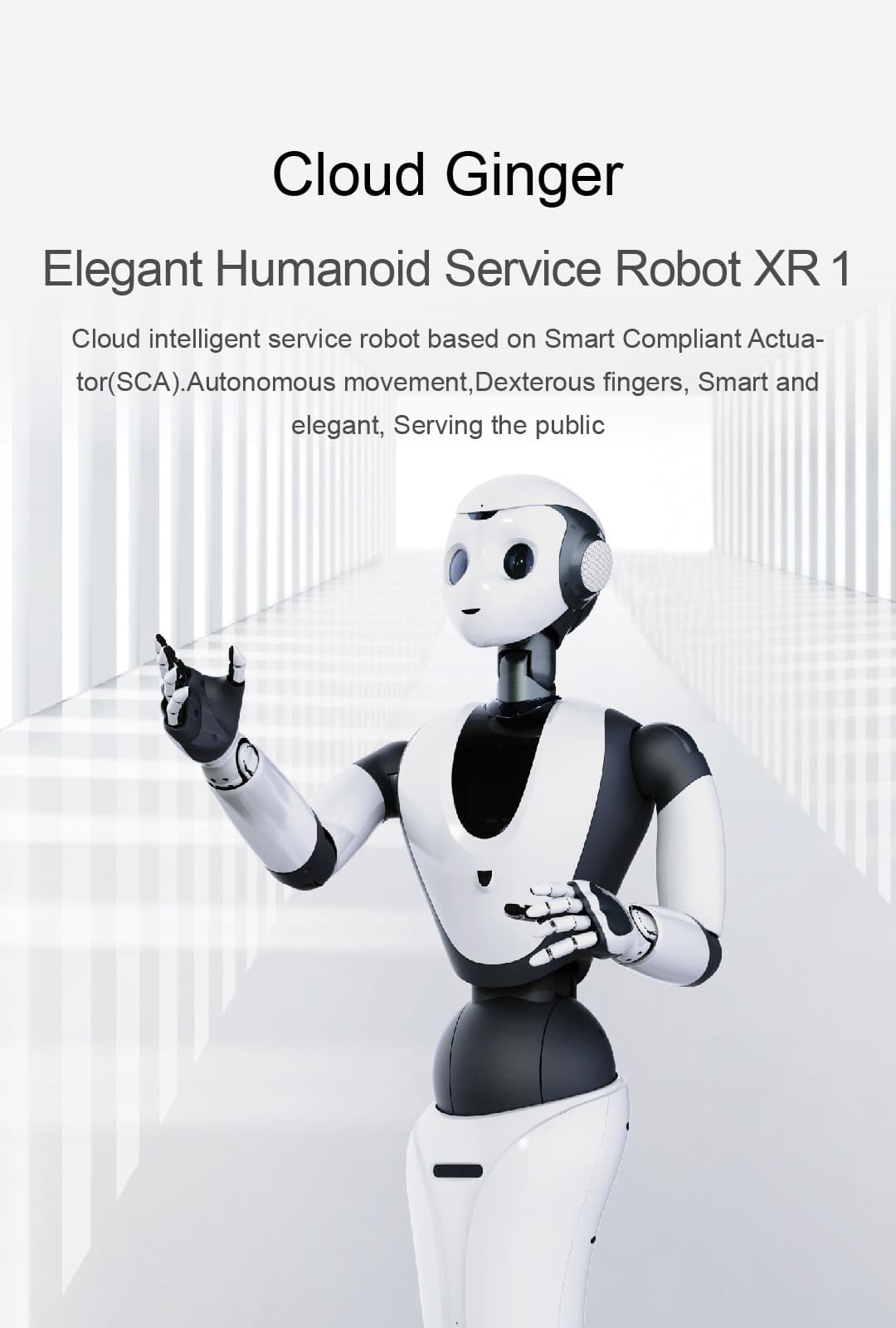
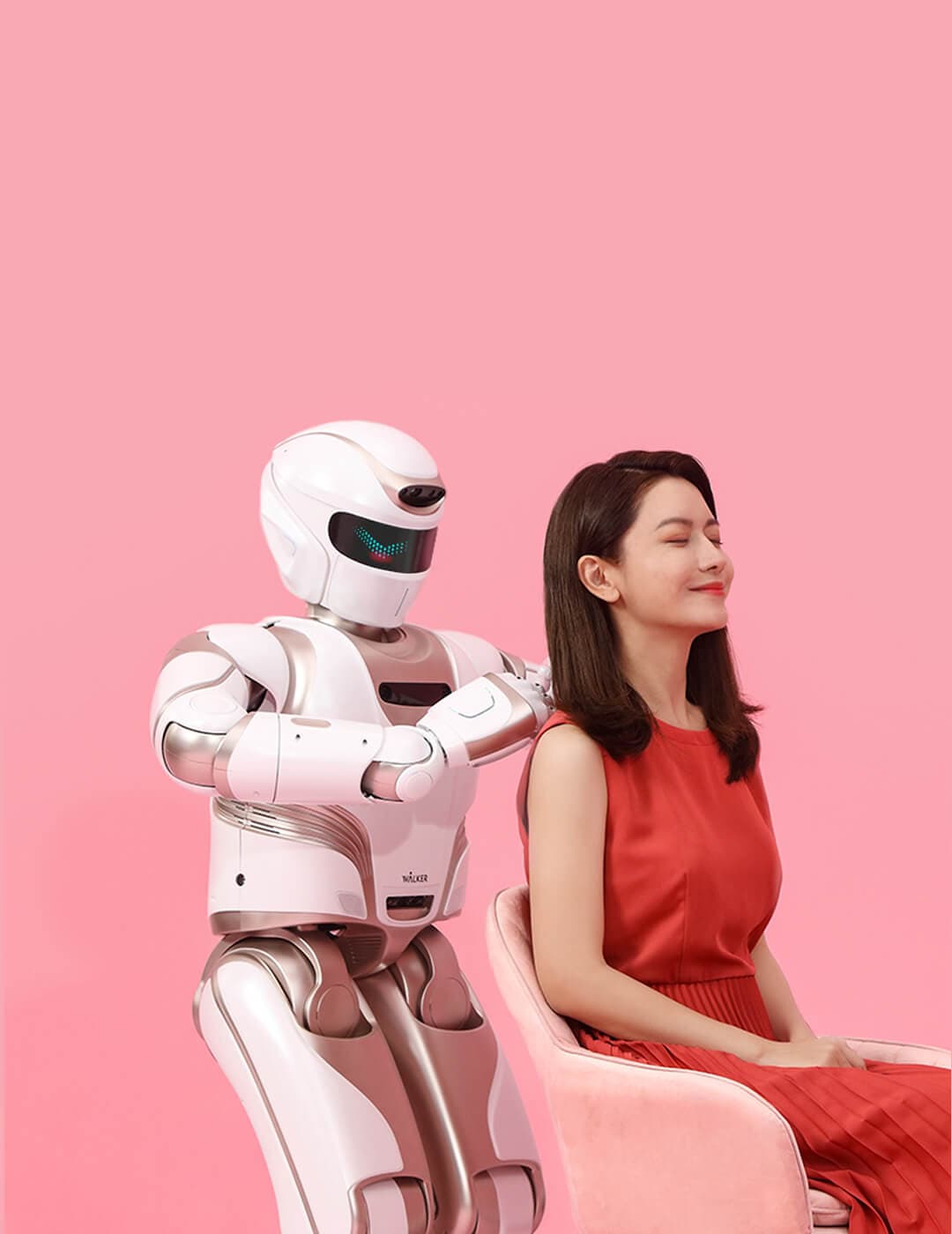
Umanoide di servizio: 163 cm, 43 kg, 20 DOF, navigazione U-SLAM, interazione multilingue.

Umanoide open-source: 130 cm, 38 kg, 23 DOF, fino a 3,5 m/s, batteria sostituibile.

Primo 'Care-bot' Fourier: 165 cm, fino a 55 DOF, batterie hot-swap.
Nuova generazione (AI Day 2025): 178 cm, ~70 kg, 82 DOF (mano 22 DOF), spina bionica e batterie solid-state.

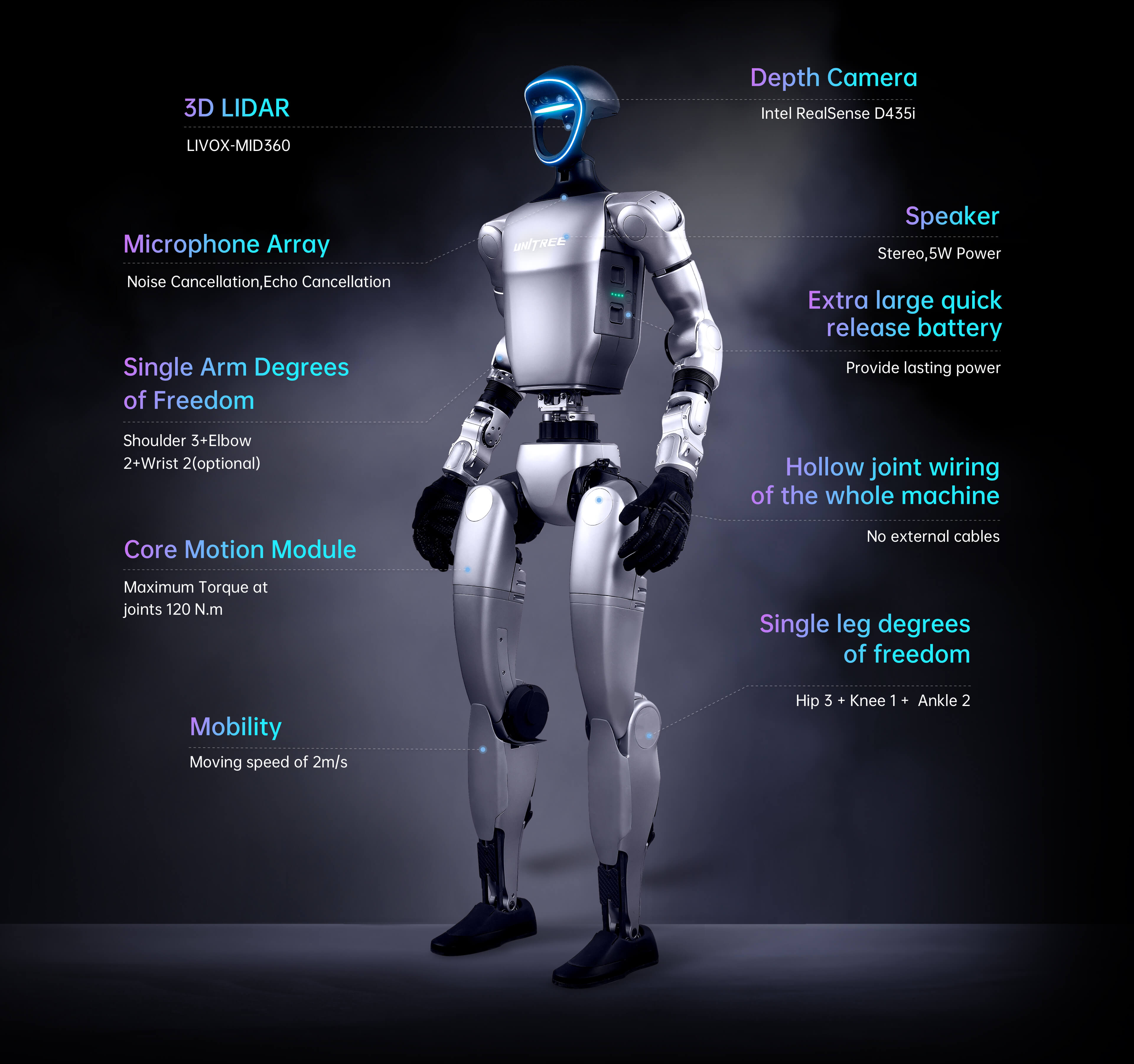
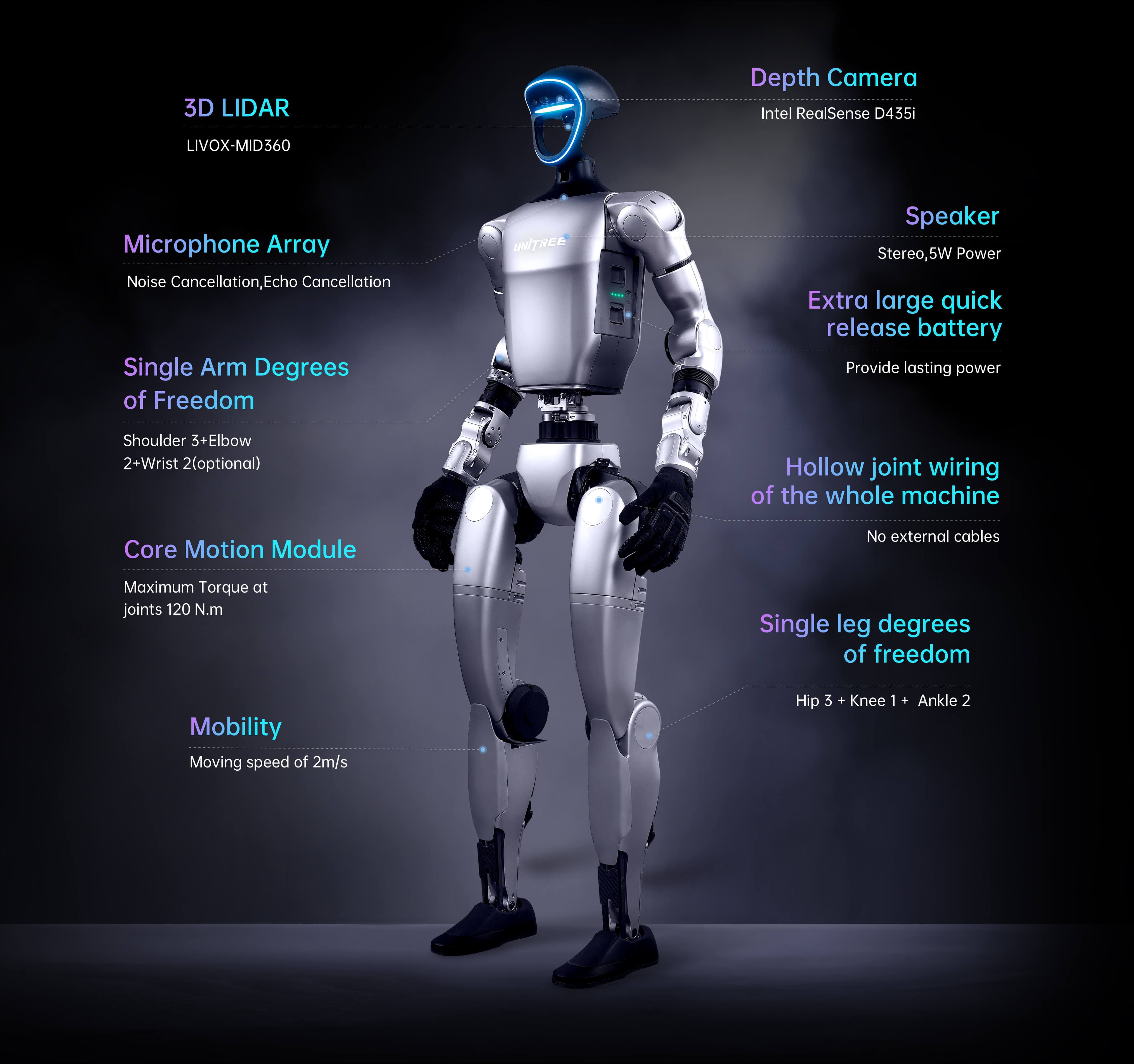
Umanoide full-size: ~169-175 cm, 40+ DOF, mano dexterous 19 DOF, payload 15 kg, fino a 3,3 m/s.
Umanoide generalista compatto: 130 cm, ~34 kg, 28 DOF, esterno flessibile, modello AI GO-1 per task senza training.

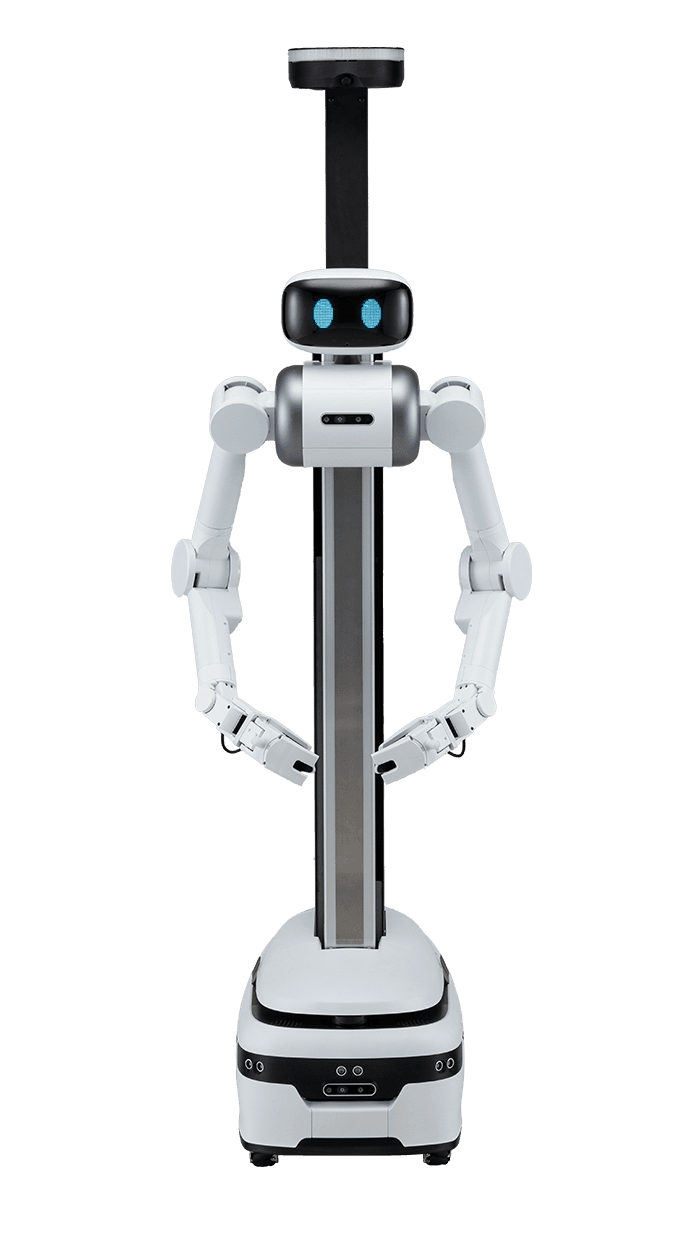
Semi-umanoide su base a ruote: ~173 cm, 85 kg, reach 2,4 m, 47 DOF, 5 kg per braccio, navigazione TrackVLA e grasping GraspVLA.

Umanoide ad alta agilità: 171 cm, 65 kg, 55 DOF (mano 12 DOF), corsa fino a 14,4 km/h, payload 20 kg a due braccia.
Umanoide atletico: 171 cm, 55 DOF, torque 400 Nm, fino a 12,9 km/h, piattaforma AI ERA-42.

Bipede da esterno, primo umanoide a camminare sulla Grande Muraglia: superfici sconnesse, scale irregolari.

Umanoide full-size: 170 cm, ~55 kg, 32 DOF, torque ginocchio 186 Nm, raffreddamento ai giunti.

Umanoide compatto low-cost: 138 cm, ~40 kg, 24 DOF, 2 m/s, rotazione vita 320°.

Piattaforma bipede di ricerca (pre-SE01): ~170 cm, telaio alluminio, fusione multi-sensore RealSense e LiDAR 360°.

Umanoide per loco-manipolazione percettiva: carico continuo di oggetti pesanti, sollevamento fino a 80 cm coordinando gambe e braccia.

Umanoide full-size modulare: 165 cm, 43 DOF (31 corpo + 12 mani), braccia 7 DOF, end-effector intercambiabili.
Umanoide full-size: 170 cm, 62 DOF e mani 16 DOF, giunti 360 Nm, salto 20 cm.

Variante alleggerita del Kuavo: ~45 kg, 26 DOF (14 braccia + 12 gambe), programmabile via HDMI/USB/cloud.
Manipolatore su base a ruote: ~170 cm, braccia 7 DOF a 10 m/s, payload 5 kg per braccio, ripetibilità ±0,1 mm, gripper per task delicati ad alta velocità.

Umanoide compatto da sviluppo: 118 cm, 30 kg, 23 DOF (fino a 41 con mani dexterous), Jetson AGX Orin 200 TOPS.
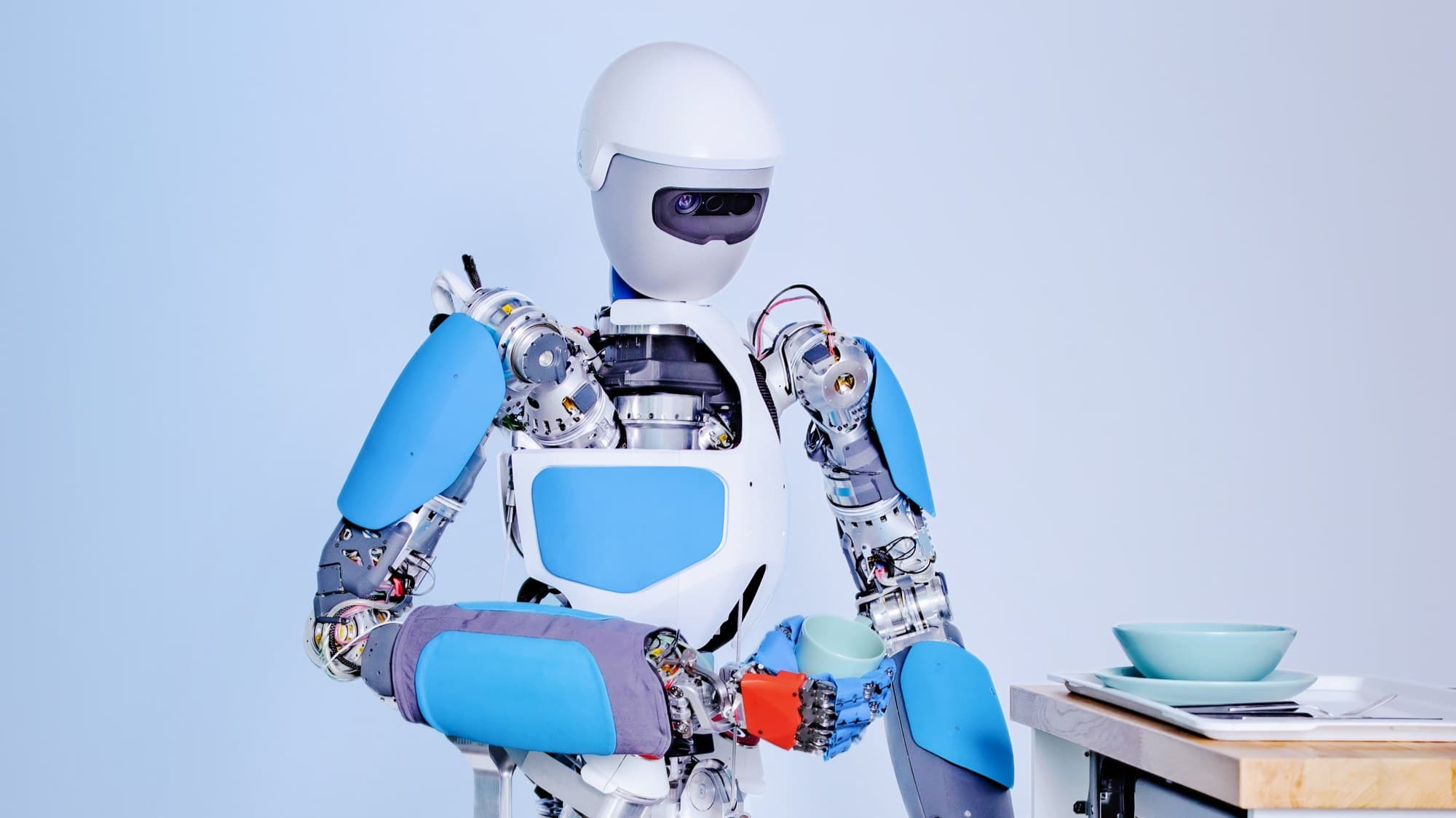
Umanoide bipede ~173 cm, 20 kg payload, mani 20 DOF con sensori tattili, AI Helix.

Umanoide su base a ruote: 183 cm, 25 DOF, payload 15 kg, attuatori Revo1 per cooperazione sicura.
Umanoide bipede 175 cm, 70 kg, 40 DOF, payload fino a 25 kg, visione 360 e batteria hot-swap per 24/7.

Umanoide cognitivo 180 cm, 80 kg, 55 DOF (12 mani), sensori forza-coppia e pelle tattile per collaborazione sicura.
Umanoide bipede da ricerca 175 cm, 95 kg, 32 DOF, giunti torque-controlled, payload ~6 kg per braccio.

Umanoide bipede da ricerca 164 cm, ~77 kg, 68 DOF, payload 10 kg con due braccia.
Piattaforma bipede da ricerca per locomozione dinamica (salti, corsa) con attuatori a sensori di forza.

Manipolatore mobile (umanoide su base mobile) per navigazione, manipolazione e percezione, ROS2.

Umanoide open-source con braccia 7 DOF, attuatori Orbita, payload ~3 kg per braccio, base mobile opzionale.

Umanoide su base a 4 ruote, ~180 cm, braccia 12 DOF, payload ~15 kg per braccio, teleoperato via VR con AI verso l'autonomia.
Umanoide bipede ~175 cm, ~80 kg, ~20 motori, payload ~20 kg, attuatori cicloidali backdrivable, percezione a camere.

Umanoide industriale 165 cm, 60 kg, 34 DOF, payload ~15 kg, 22+ sensori (LiDAR, camere di ispezione) e batteria swap.

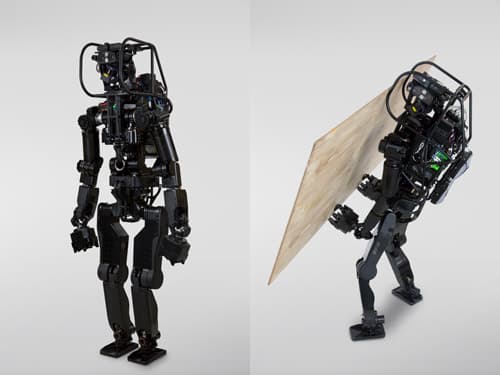
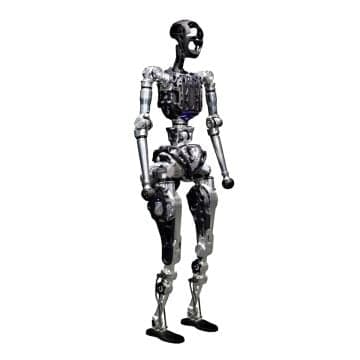
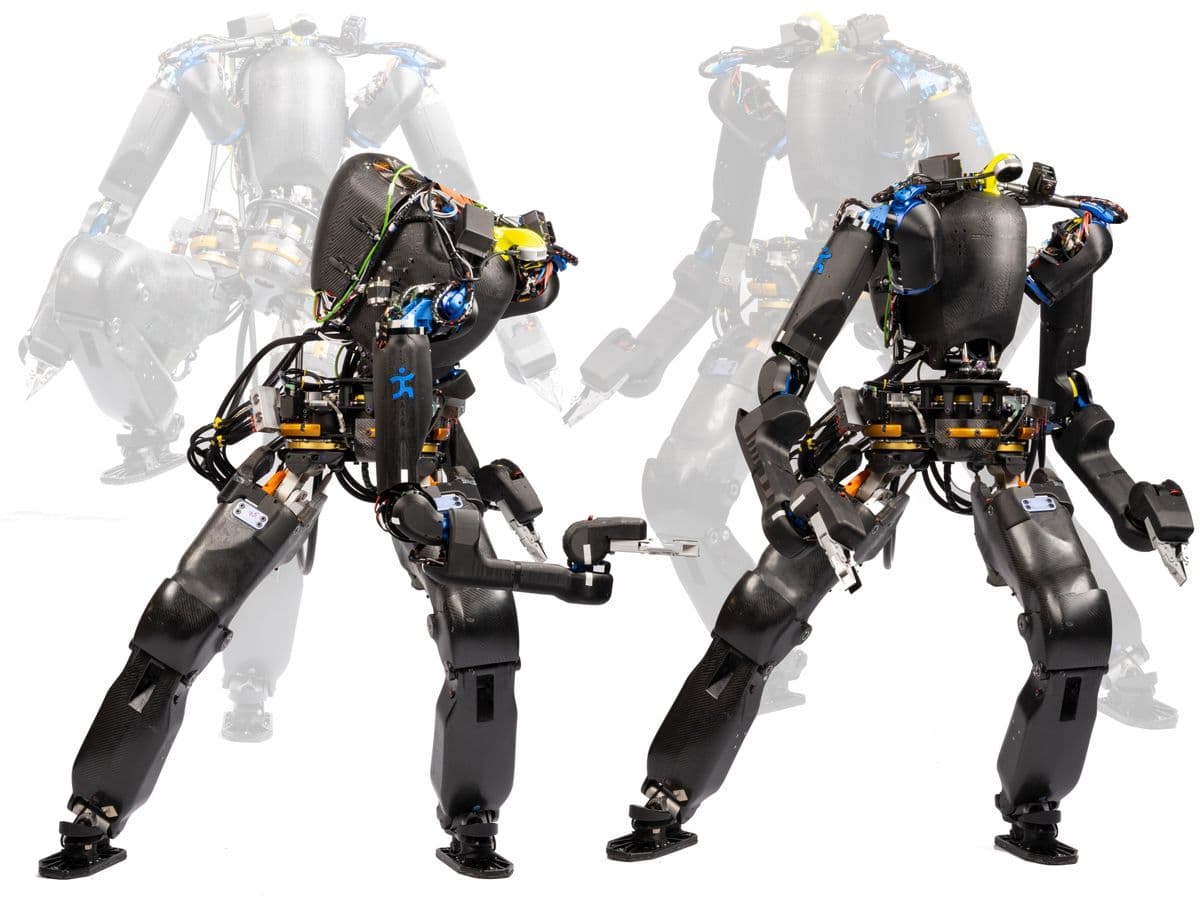
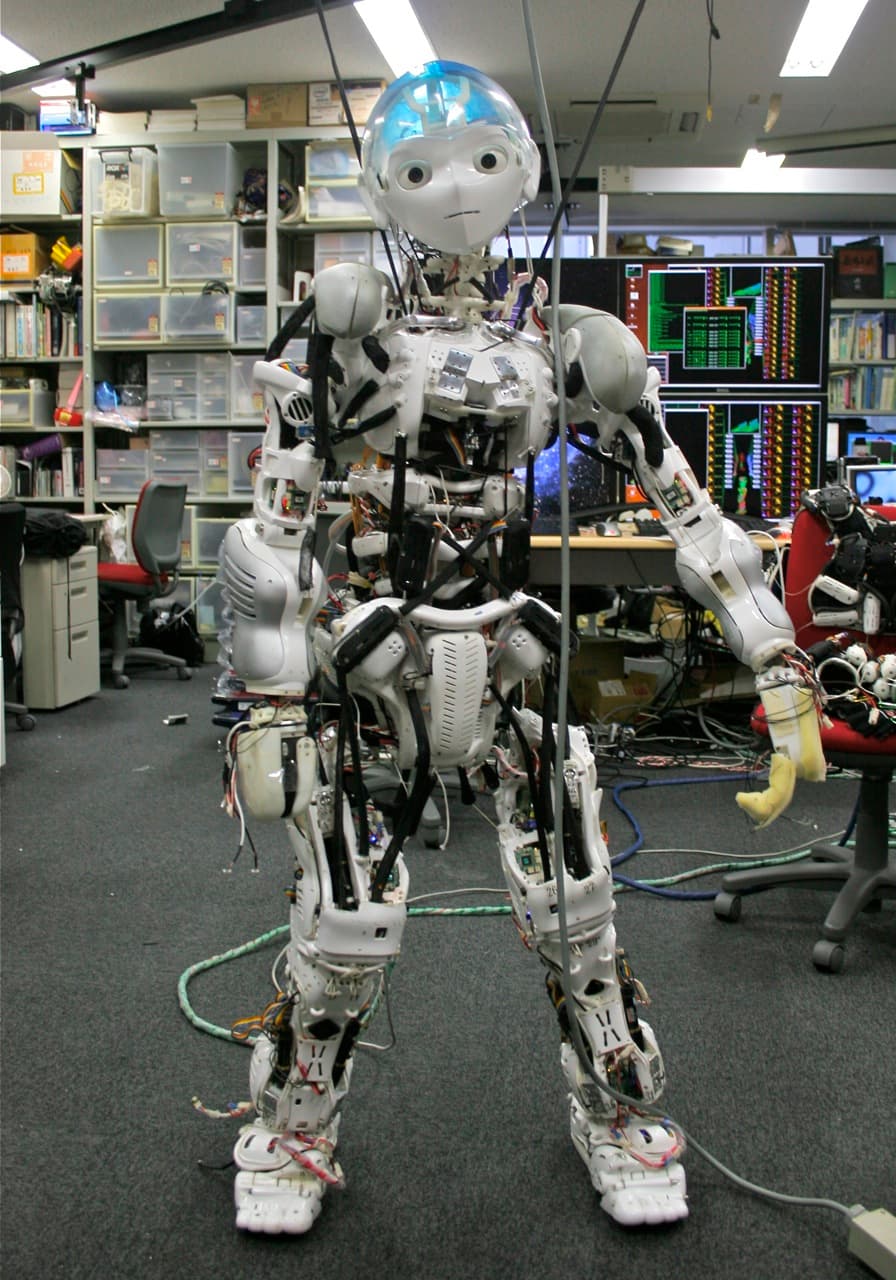
Androide ~183 cm con scheletro a 206 ossa, oltre 200 DOF, ~1000 muscoli artificiali idraulici e 500 sensori.
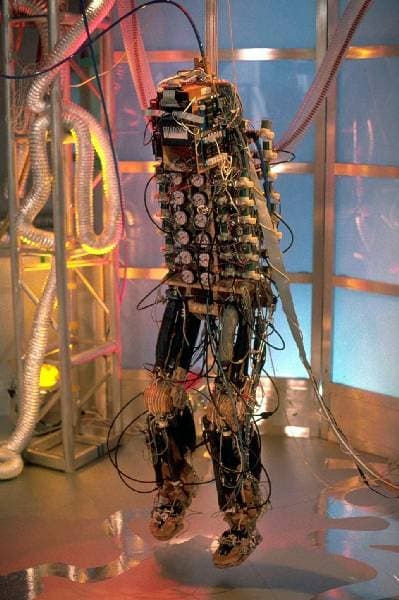
Umanoide muscolo-scheletrico tendon-driven con attuatori elastici (fino a 300 N), giunti 3 DOF su collo/spalle/polsi.
Umanoide da lavoro pesante 182 cm, 101 kg, 37 DOF, giunti elettrici ad alta potenza.

Umanoide industriale (team ex-NASA Robonaut) per lavoro fisico qualificato: saldatura, molatura, ispezione.

Umanoide open-source ~140 cm, ~34 kg, attuatori 120 Nm, OS in Rust (K-OS).

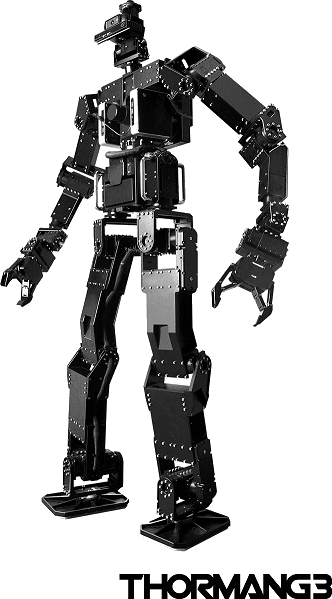
Umanoide teleoperato di 3a gen, 32 moduli torque-servo, controllo via Master Maneuvering System con force feedback.
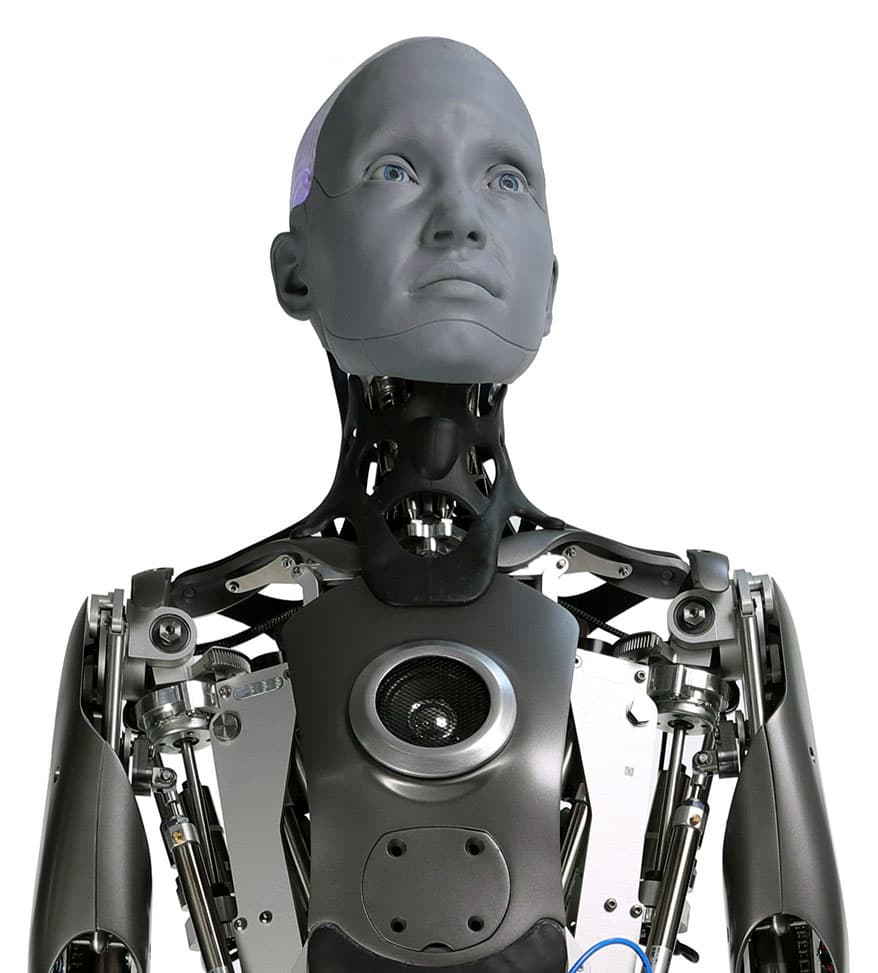
Umanoide sociale 187 cm, 61 DOF (27 facciali), tecnologia Mesmer, integrato con LLM.

Umanoide sociale 167 cm con pelle Frubber, 83 DOF (36 testa/collo), oltre 60 espressioni.

Piccolo umanoide bipede 58 cm, 5,6 kg, 25 DOF, camere HD e sensori tattili.

Umanoide sociale su base a 3 ruote, 121 cm, 20 DOF, display tablet e riconoscimento emozioni.
Umanoide industriale voice-operated da esoscheletri self-balancing, end-effector intercambiabili, edge AI NVIDIA Jetson.
Umanoide industriale collaborativo a doppio braccio 6 assi, 15 DOF, payload 1,5 kg per mano, ripetibilità 0,03 mm, visione integrata.
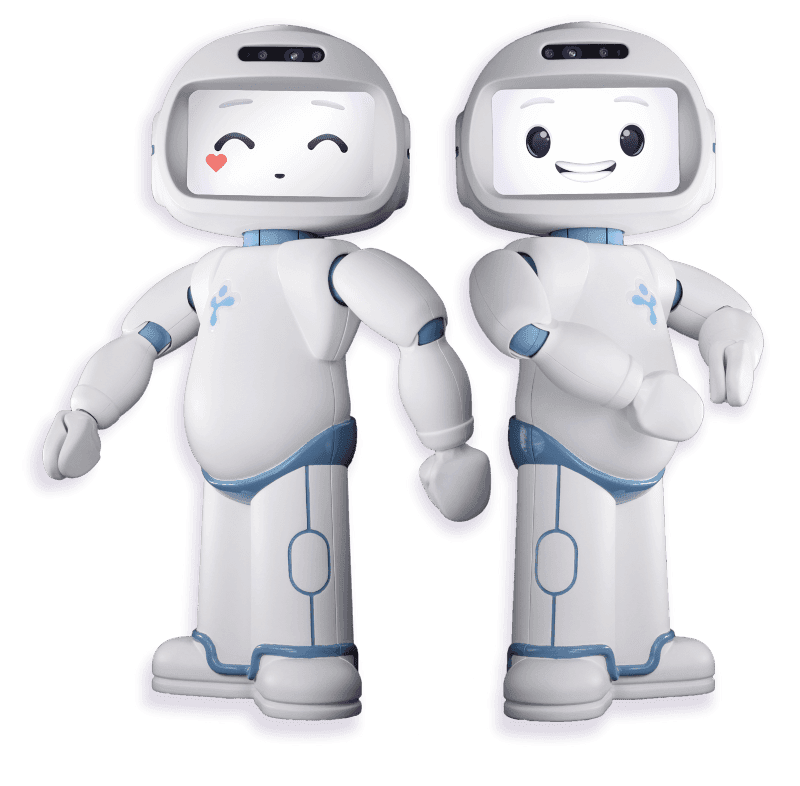
Umanoide companion ~1 m con proporzioni da bambino, oltre 50 DOF, silicone medicale e batteria swap, Motion Language Model.
Umanoide bipede full-size: 175 cm, 42 DOF (7 per braccio + mani 11 DOF), payload doppio braccio ~20 kg, autonomia 4-5 h.

Umanoide compatto da 140 cm e 40 kg, 24 DOF (espandibili a 49), coppia di picco 130+ N·m, mano 5 dita fino a 5 kg.

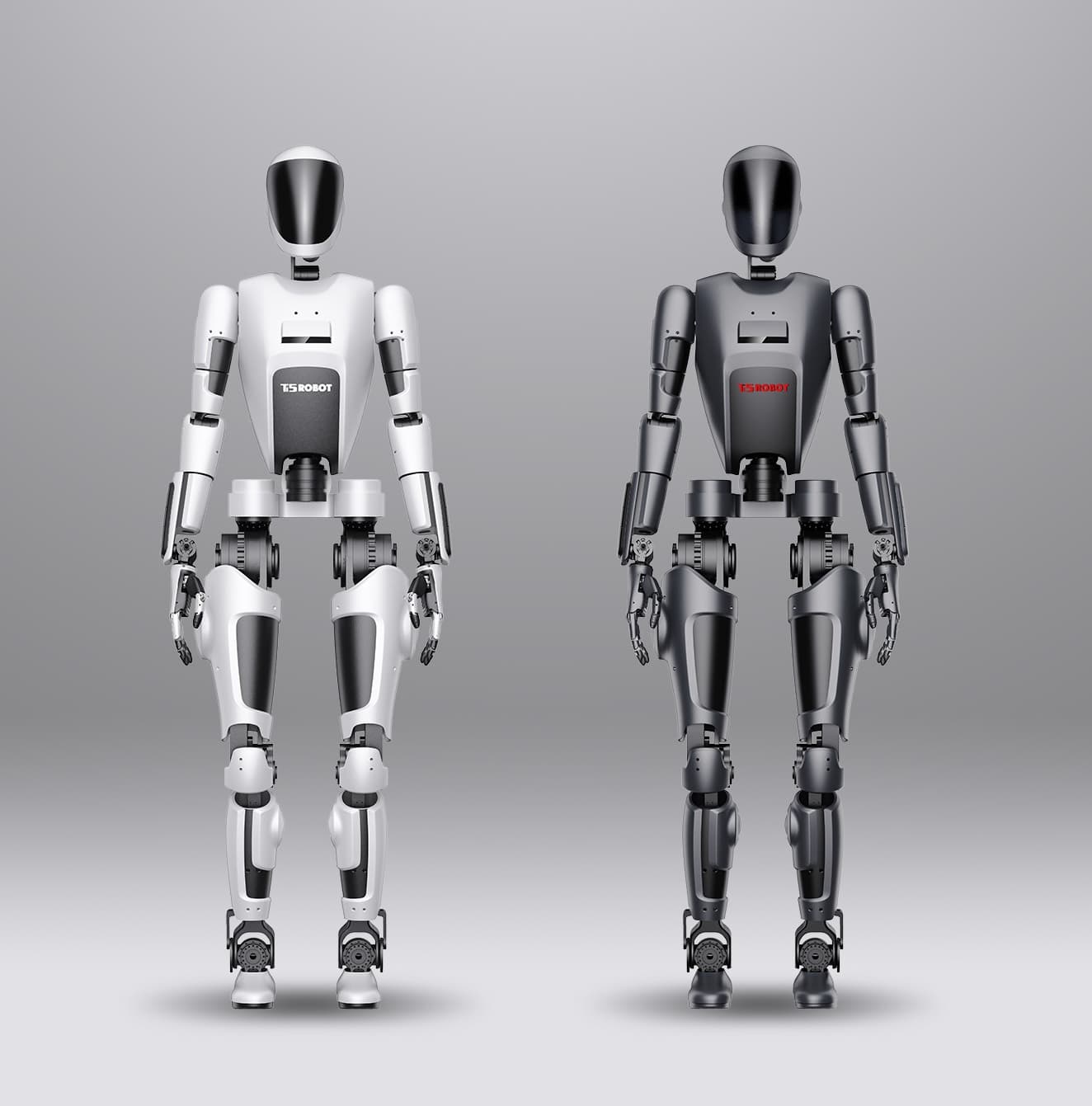
Umanoide bipede full-size da 179 cm e 60 kg, 52 DOF, 550 TOPS, mano 5 dita, autonomia 4+ h, capace di camminare/correre/saltare.
Umanoide bipede da 163 cm, 33 DOF, 275 TOPS, riconoscimento volto e voce per accoglienza e guida.

Umanoide su ruote con doppio braccio 7 DOF, 20 DOF totali, lift verticale 0-2,1 m, IPC i9 + GPU per logistica, manifattura e ispezione.
Umanoide di servizio da 158 cm su chassis omnidirezionale a 3 ruote, 34 attuatori compliant, AI cloud e NLP per interazione.

Umanoide bipede da ~168 cm e 75 kg, oltre 50 DOF, struttura a doppio parallelo, RobotGPT integrato.

Umanoide leggero da 118 cm e 30 kg, 18 DOF, coppia di picco 150 N·m, payload in camminata 5 kg, edge AI fino a 67 TOPS.
Umanoide su ruote ad altezza regolabile 1,46-1,86 m, 47 DOF, ~2000 sensori tattili, payload 6 kg per braccio, navigazione laser-SLAM.

Umanoide bipede full-size da 170 cm e 65 kg, 42 DOF, coppia max 352 N·m, doppio braccio 7 DOF con payload 20+ kg, mano con sensori tattili.
Semi-umanoide industriale con doppio braccio a controllo di forza, payload 14 kg, altezza operativa fino a 2 m, sensing tattile e battery swap autonomo.
Umanoide su ruote per manifattura flessibile, 230 kg, doppio braccio bionico 7 DOF, 22 DOF con busto sollevabile/inclinabile, batteria 2 kWh 5+ h.
Umanoide leggero da 170 cm e 48 kg, 44 DOF, giunti gamba ad alta coppia 490 N·m, braccio 7 DOF, doppia visione lidar + depth camera.
Umanoide bipede da 160 cm e 60 kg, 25 DOF con attuatori QDD a controllo di forza (fino a 340 N·m), locomozione via reinforcement e imitation learning.
Umanoide su piattaforma fissa ad altezza regolabile 1,35-1,77 m e 61 kg, 31 DOF a controllo di forza per manipolazione di precisione e raccolta dati.

Umanoide bipede da 170 cm (Shenzhen), prestazioni oltre l'80% di un uomo della stessa statura, costo operativo a circa 1/3 del lavoro umano, movimenti agili.

Umanoide snello e leggero da 151 cm e 39 kg, 34 DOF, mani a 5 dita, riconosce volti e segue oggetti; piattaforma di ricerca AIST.
Umanoide bipede da 125 cm e 55 kg, 41 DOF, piattaforma di ricerca KAIST sul cammino bipede e la manipolazione.

Semi-umanoide su ruote da 140 cm e 131 kg, doppio braccio 7 DOF (6 kg totali), gamba 6 DOF, controllo whole-body 20 assi, 1,5 m/s.

Piattaforma bipede di ricerca (solo gambe, base del futuro Digit) nata a Oregon State su grant DARPA, 22 DOF, detentrice del Guinness dei 100 m per robot bipede (24,73 s).

Umanoide bipede elettrico da 190 cm, 125 kg, 44 DOF, sviluppato da NASA per la DARPA Robotics Challenge; piattaforma di ricerca distribuita a IHMC e universita.
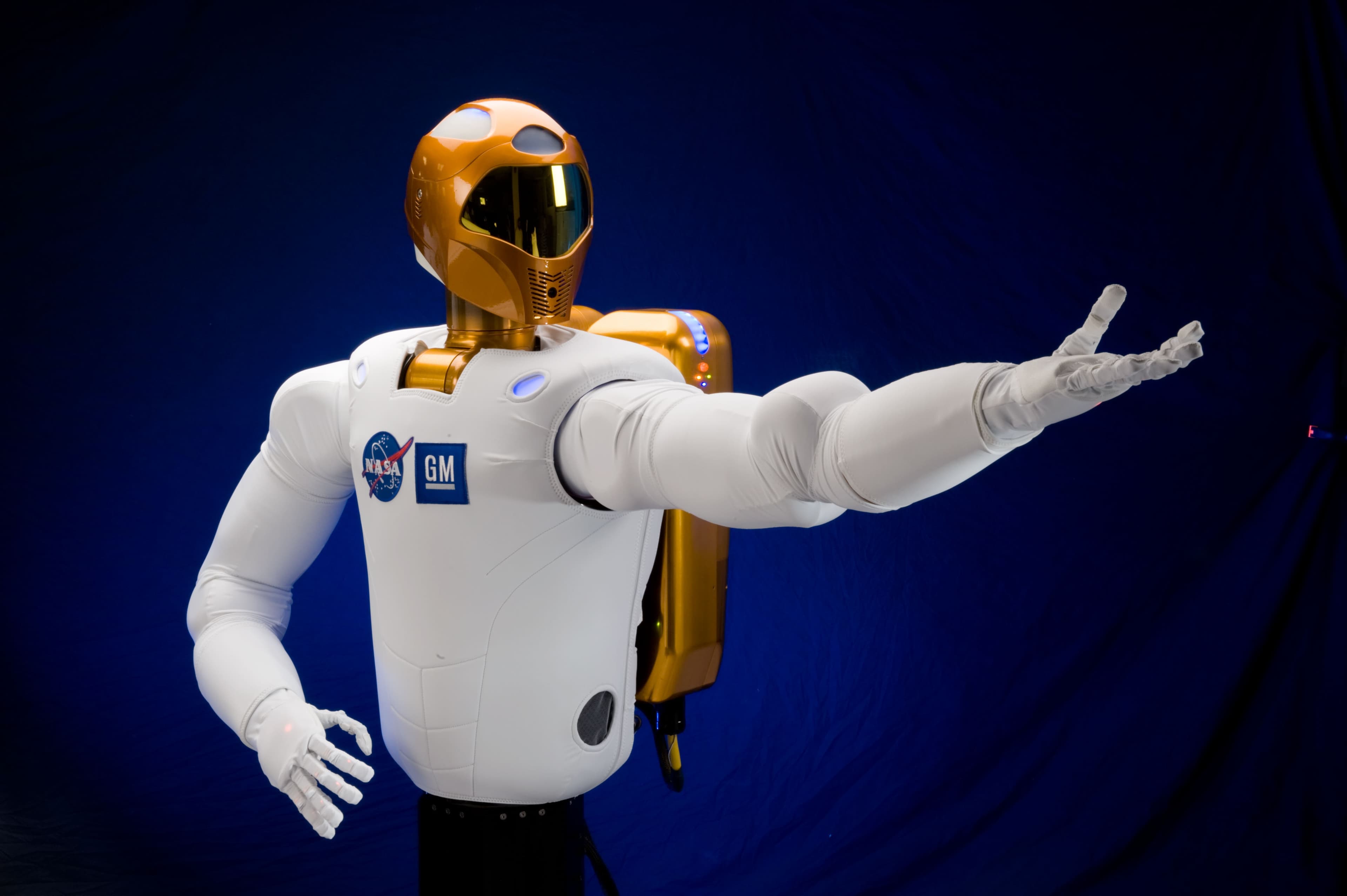
Umanoide a torso + due braccia (7 DOF ciascuno, mani destre) sviluppato con General Motors, primo robot umanoide nello spazio (ISS, 2011); ~150 kg con gambe, oltre 350 sensori.
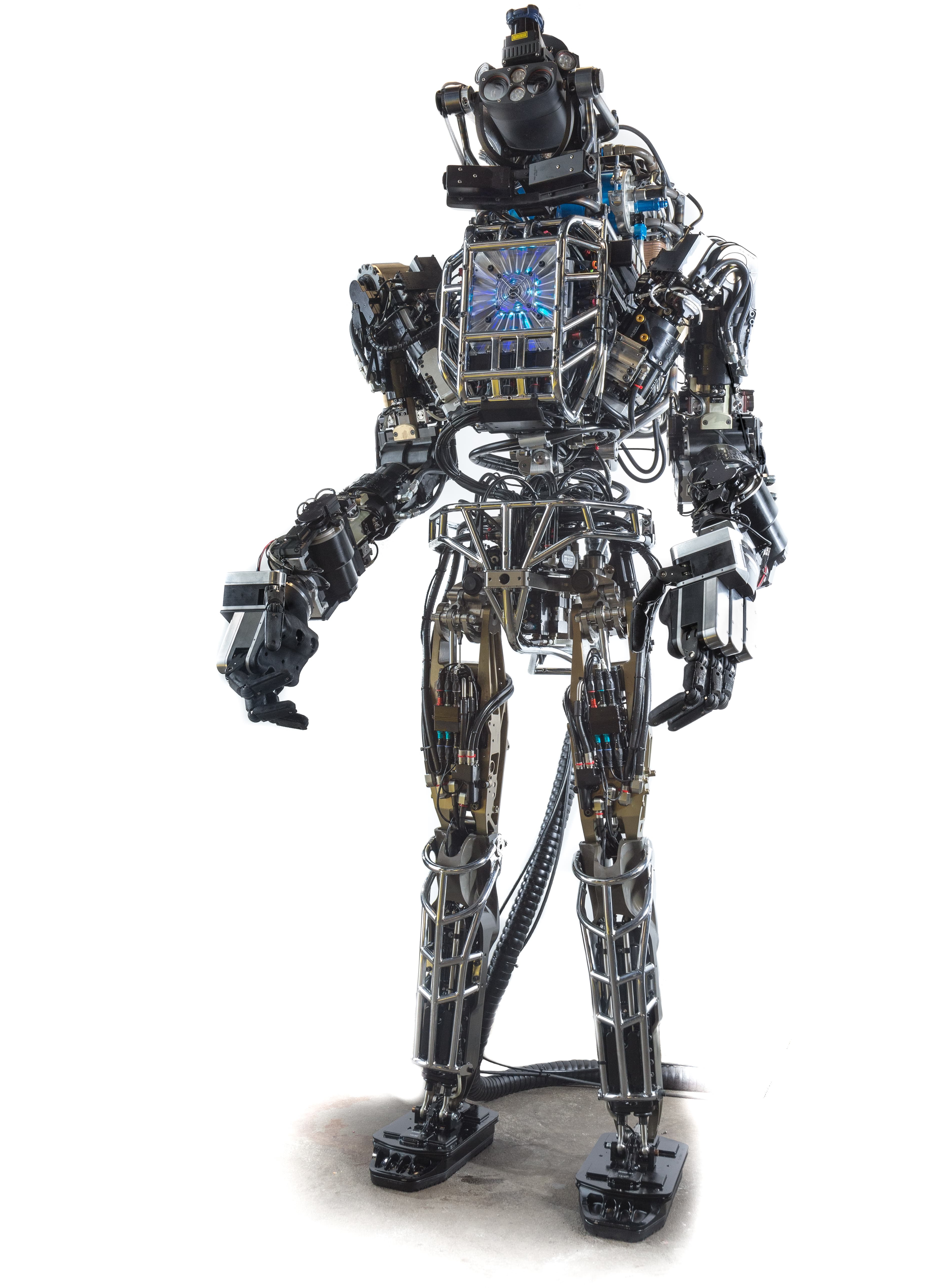
Umanoide ibrido elettrico-idraulico (braccia elettriche 7 DOF, busto idraulico 2 DOF, gambe idrauliche 5 DOF), erede di Atlas DRC e Valkyrie, sviluppato a Pensacola (Florida).

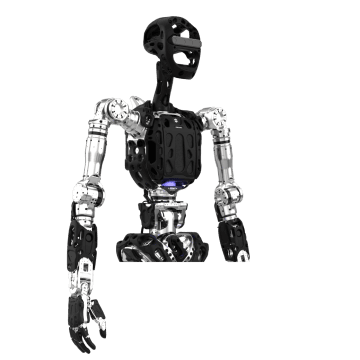
Umanoide a torso superiore (senza gambe) con 19 DOF, giunti ad alta velocita (9 rad/s) e payload continuo 10 kg, ~85 kg; spinoff IHMC fondato da Jerry Pratt.

Umanoide bipede da 142 cm, ~38 kg, attuatori elettrici 'muscle-like' forza-controllati, capace di correre e saltare (2,1 m/s); progetto open-source del lab di Dennis Hong, 6 volte campione RoboCup.

Bipede sperimentale da ~76 cm e 2,7 kg in fibra di carbonio che combina gambe multi-giunto e thruster a elica per camminare, saltare e volare; sviluppato al Center for Autonomous Systems and Technologies di Caltech.

Umanoide bipede teleoperato del lab di Sangbae Kim, controllato da un operatore tramite interfaccia di bilanciamento; usato per versare caffe, usare un'ascia e maneggiare un estintore.

Umanoide su base auto-bilanciante a due ruote con torso e braccia, capace di trasformarsi da 0,5 m statico a 1,5 m dinamico; progetto di Mike Stilman finanziato dall'Office of Naval Research.

Umanoide a 4 arti con torso e braccia che si muove su cingoli (stile carro armato) per stabilita, sviluppato dal Tartan Rescue Team per la DARPA Robotics Challenge.

Umanoide a torso con due braccia su base a ruote (sotto 60x60 cm) e 'spina' che regola l'altezza da terra agli scaffali alti; oltre 25 lbs per braccio, architettura teleoperation-first; pilota con GXO Logistics.

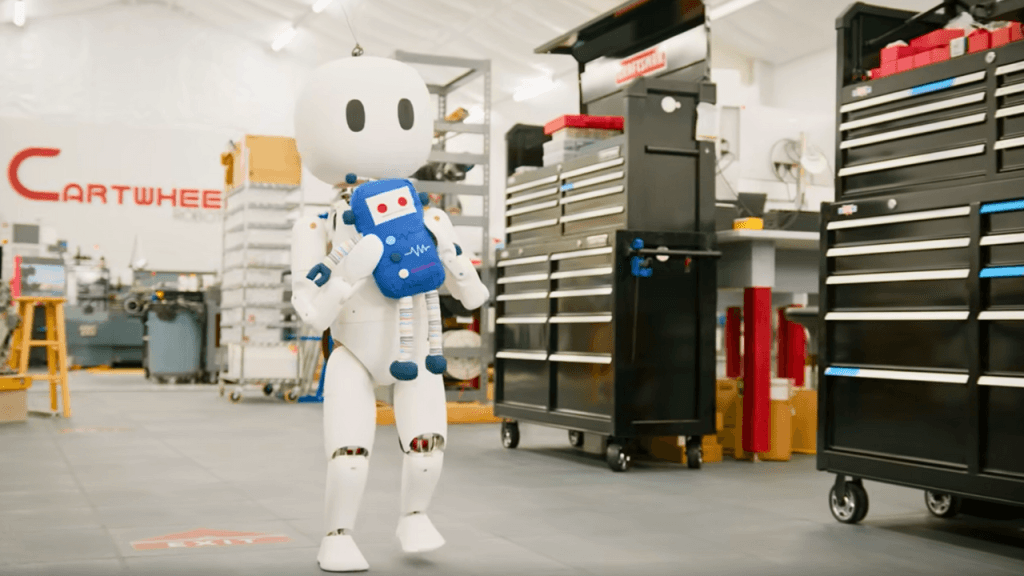
Umanoide bipede per la casa con testa a display espressivo e design firmato Yves Behar; startup di Palo Alto fondata nel 2023 da Christoph Kohstall, poi acquisita da 1X.

Umanoide storico a torso superiore con braccia e testa, sviluppato negli anni '90 al MIT AI Lab dal team di Rodney Brooks per studiare comportamento sensomotorio e interazione umana.
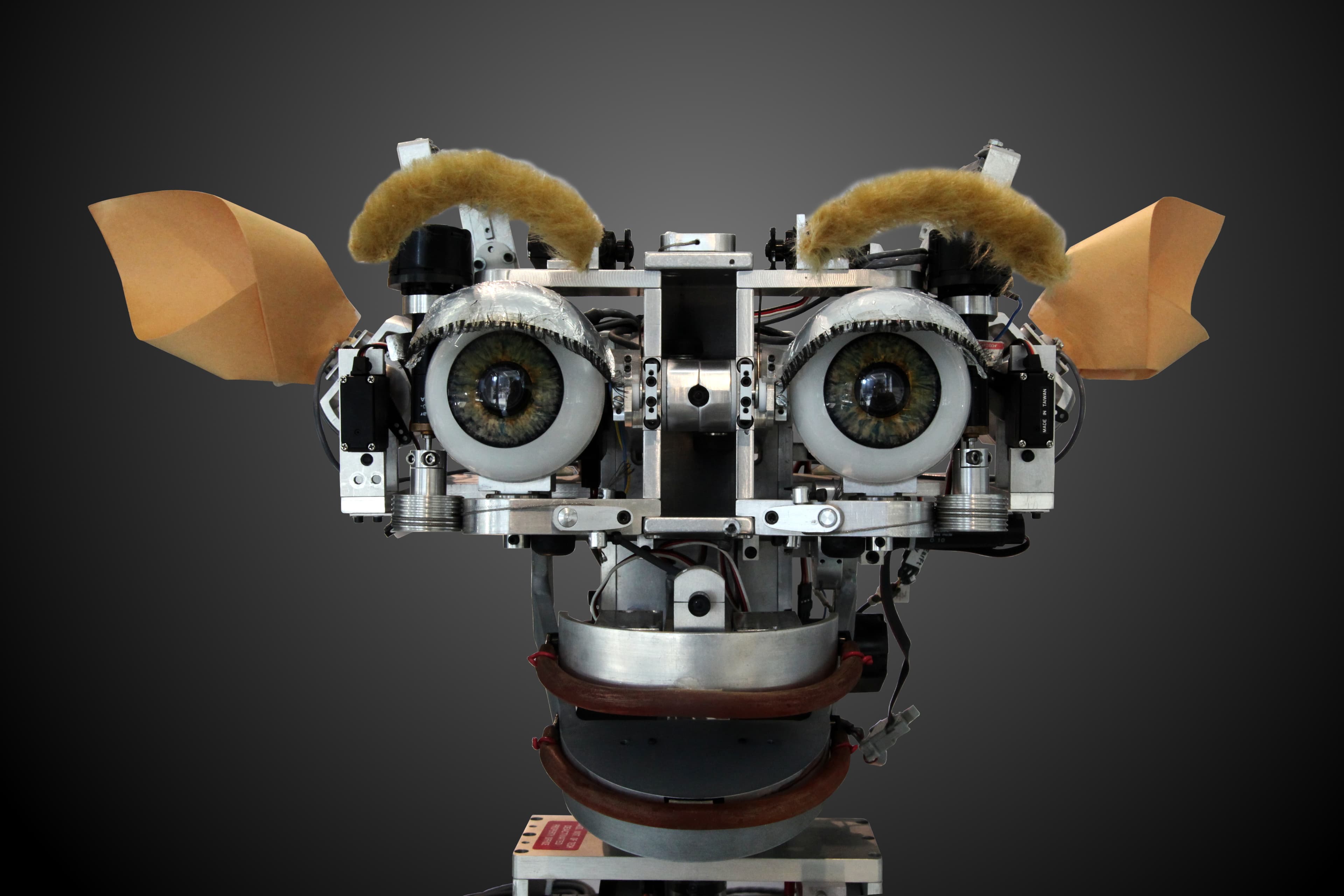
Testa/volto robotico espressivo (1997) creato da Cynthia Breazeal al MIT, primo robot progettato per coinvolgere le persone in interazione faccia a faccia naturale, pioniere della robotica sociale.
Umanoide bipede da 145 cm, 36 DOF, payload fino a 10 kg, navigazione visiva e coordinazione mano-occhio avanzate..

Umanoide bipede da 177 cm, 21 DOF, manipolazione fino a 1,5 kg per mano, riconosce 45 emozioni umane e 85 suoni ambientali; prototipo non in vendita.
Umanoide ibrido wheel-foot da 175 cm in modalita bipede (1,4 m quadrupede), 38 DOF, batteria allo stato solido fino a 6 ore; uso sperimentale 2025, piccola produzione 2026.
Umanoide bipede full-size da 174 cm, 42 DOF, mani Magic-Hand a 11 DOF, payload 20 kg per braccio (40 kg totali), autonomia fino a 5 ore.
Umanoide consumer ultra-economico lanciato a circa 1.300 EUR, posizionato come il piu accessibile sul mercato.

Umanoide da 170 cm e 50 kg con 44 DOF, giunti gamba fino a 490 Nm, braccio 7-DOF e 5 camere depth per percezione a 360 gradi.

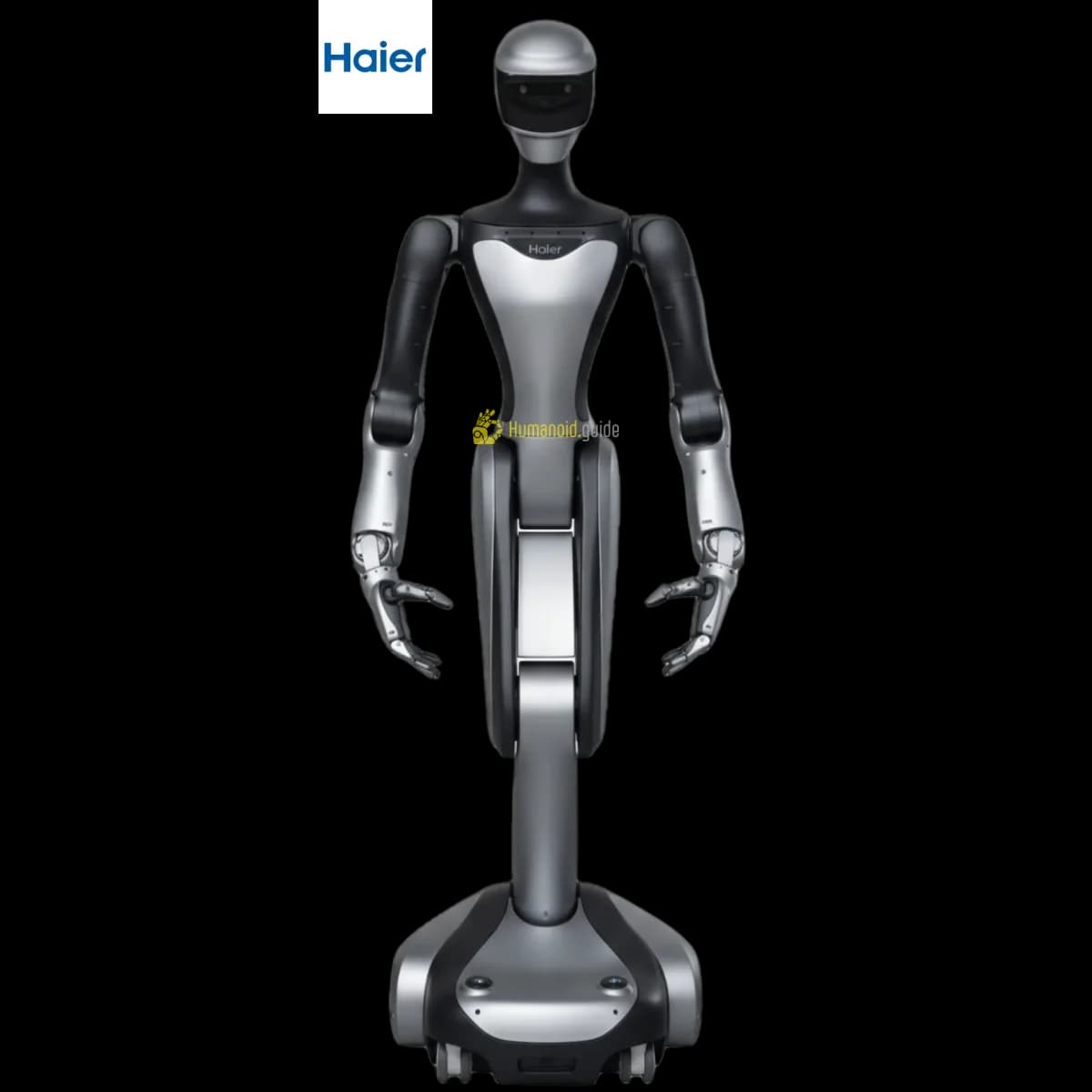
Umanoide su base a ruote da 44 DOF in deployment commerciale per guida clienti, base della versione Hiva di Haier.

Umanoide su base a ruote da 163 cm e 110 kg con 34-40 DOF, bracci doppi 7-DOF da 10 kg, 300+ TOPS e 8 ore di autonomia.
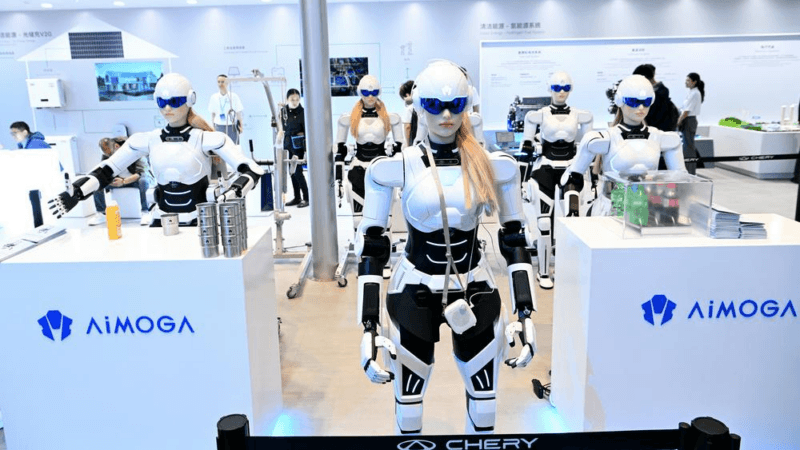
Umanoide del costruttore EV Chery da 167 cm e 70 kg con 40 DOF, 1,5 kg di carico al braccio e interazione in 11 lingue, in vendita su JD.com a circa 38.000 EUR.

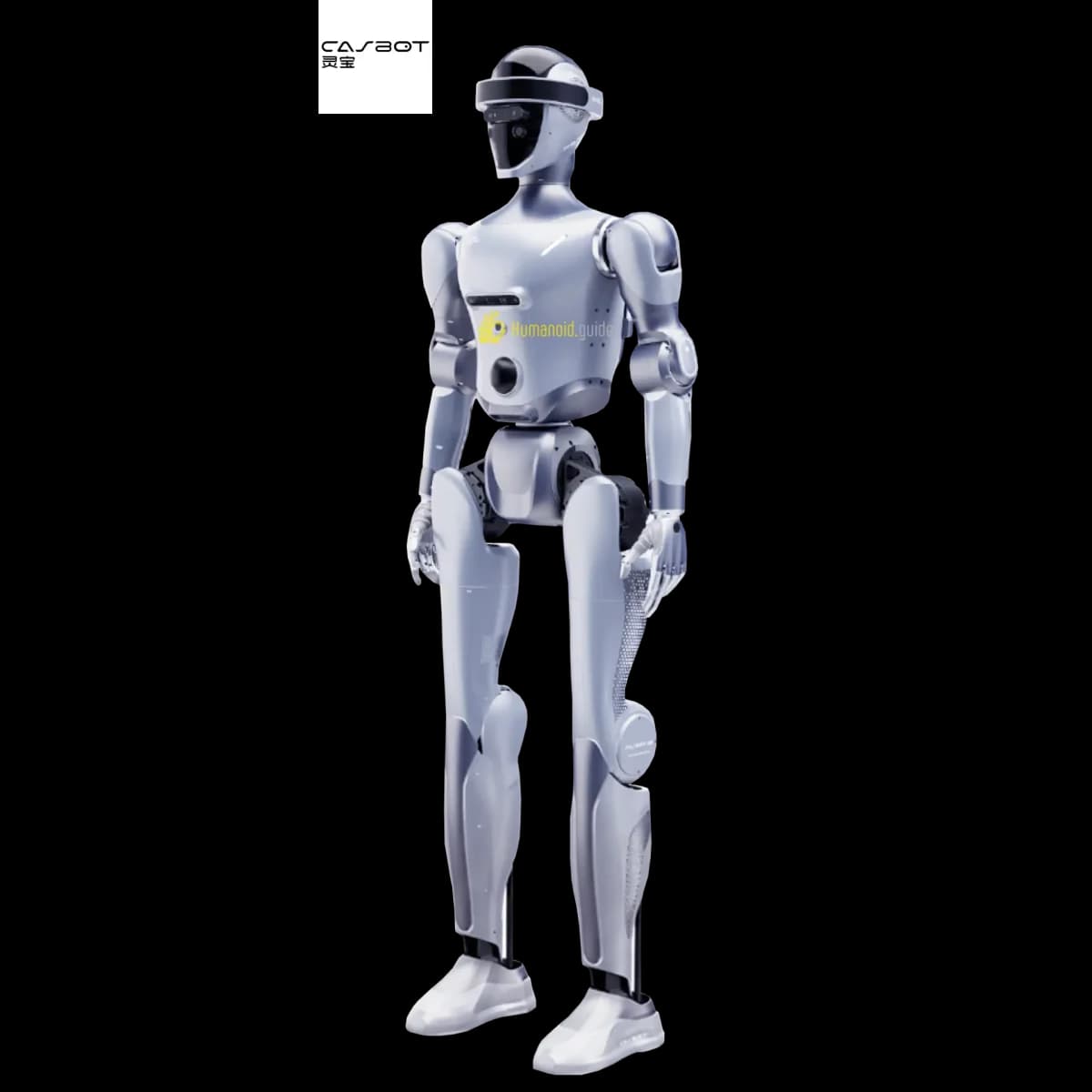
Umanoide da 153 cm e 62 kg con 41 DOF, mani a cinque dita, andatura a ginocchio dritto e 1.500 TOPS, in mass production a circa 25.000 EUR.
Umanoide semi-antropomorfo su base a ruote, guidato dal modello embodied WALL-A che integra VLA e world model, ancora in sviluppo.

Umanoide open-source da 185 cm, 85 kg e 60 DOF, piattaforma modulare con varianti light e wheeled.

Umanoide bipede full-size da 62 DOF (16 per mano destra) per ambienti industriali heavy-duty, mostrato al WAIC 2025.

Umanoide di servizio del leader dei service robot KEENON, mostrato al WAIC 2025 per food/beverage service.

Umanoide da 170 cm e 30 kg in fase di test per public security e training in fabbrica.
Umanoide su base mobile a quattro braccia con 52 DOF e precisione millimetrica, presentato come primo umanoide AI a quattro braccia.

Umanoide bipede dimostrato con capacita di rialzarsi da terra in meno di un secondo.
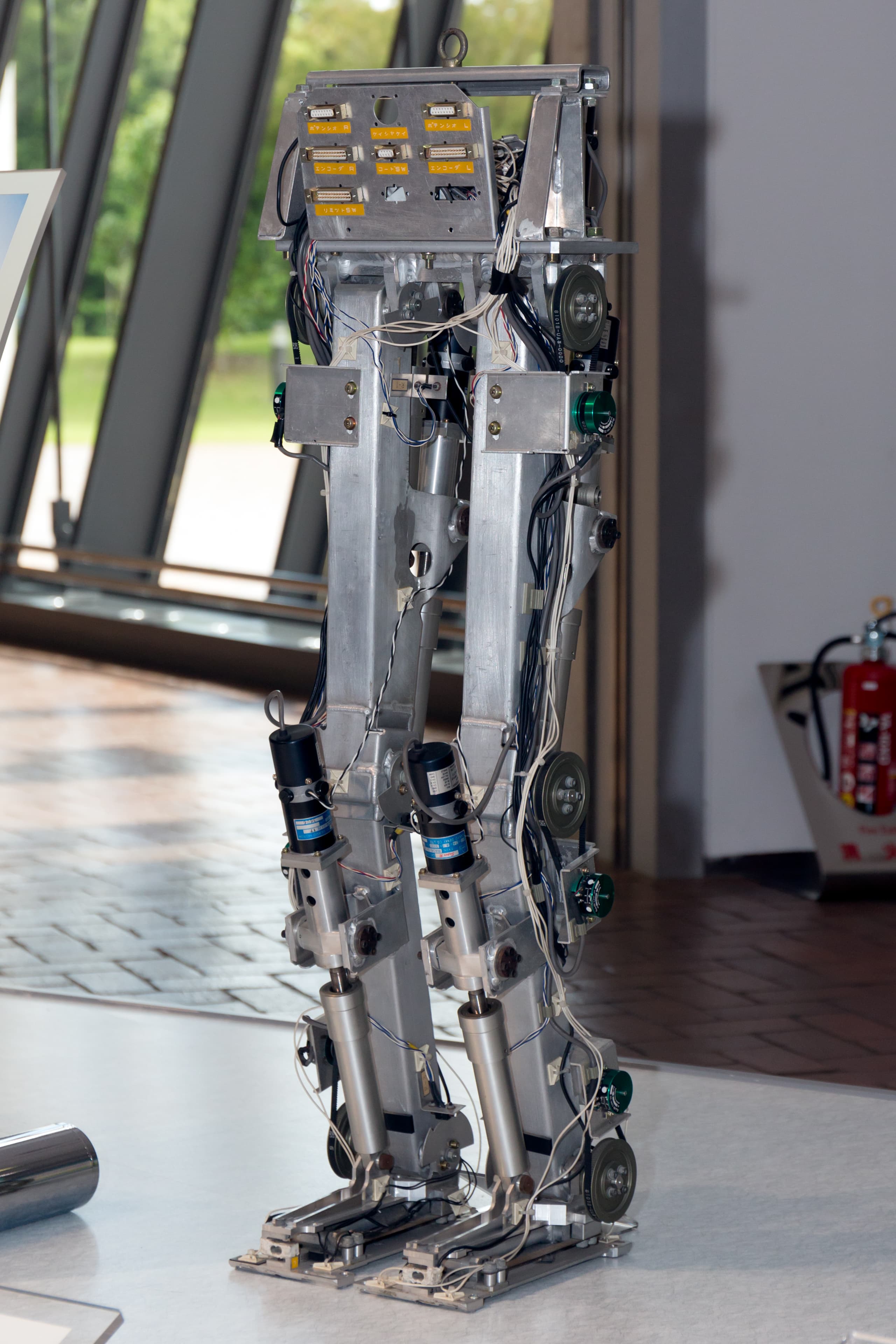
Primo prototipo a gambe Honda (1986), 6 DOF, solo arti inferiori per studio del passo statico.
Serie sperimentale Honda di gambe robotiche (1987-1993), 12 DOF, E2 raggiunge il cammino dinamico a 1,2 km/h.

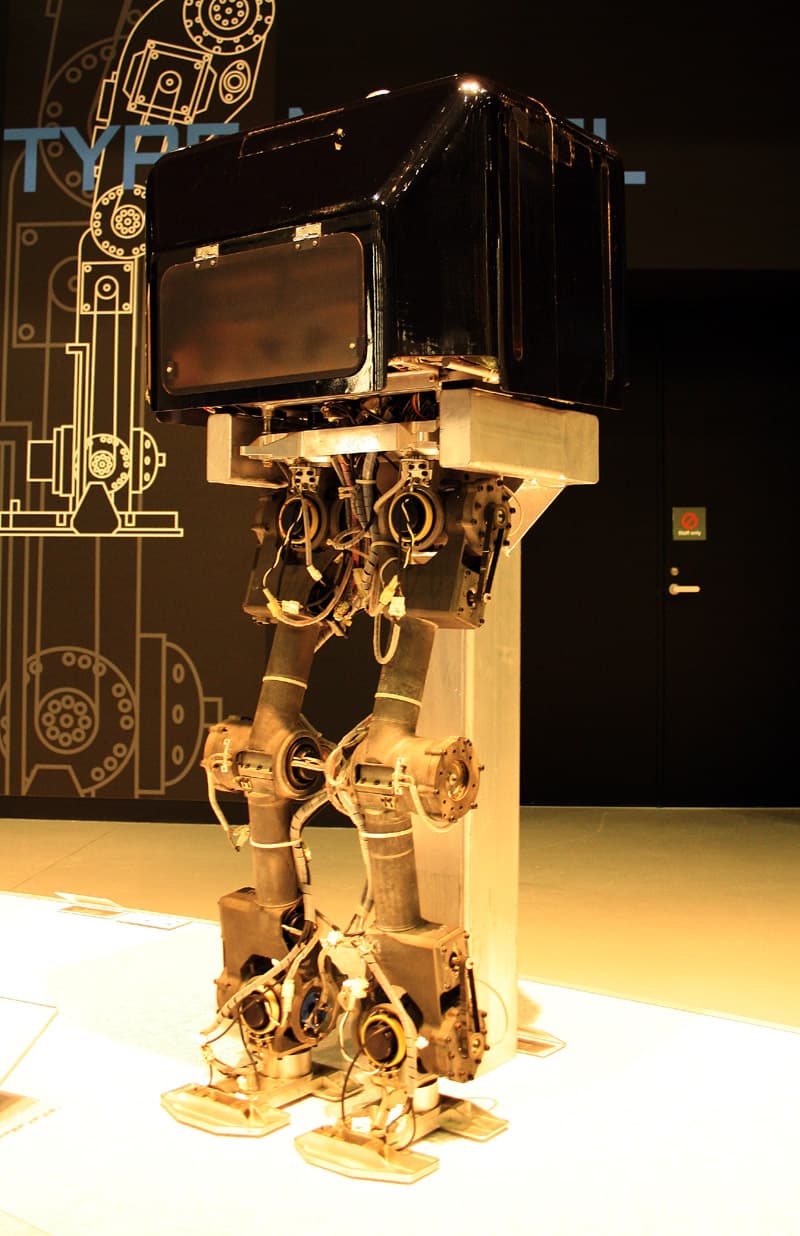
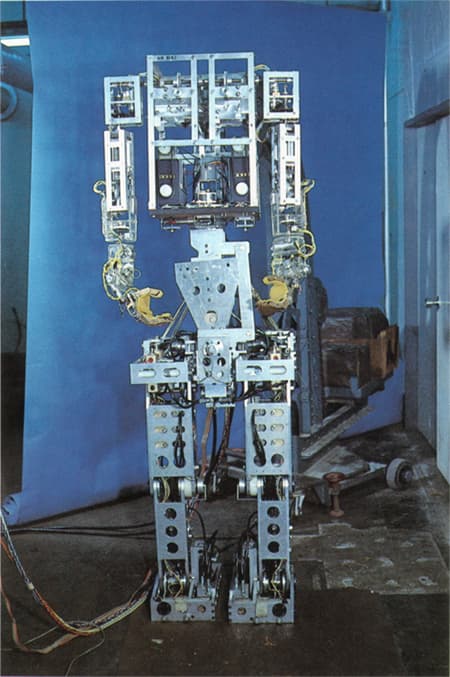
Primo umanoide completo Honda (1993), 191 cm, 175 kg, 30 DOF, alimentazione e calcolo esterni.
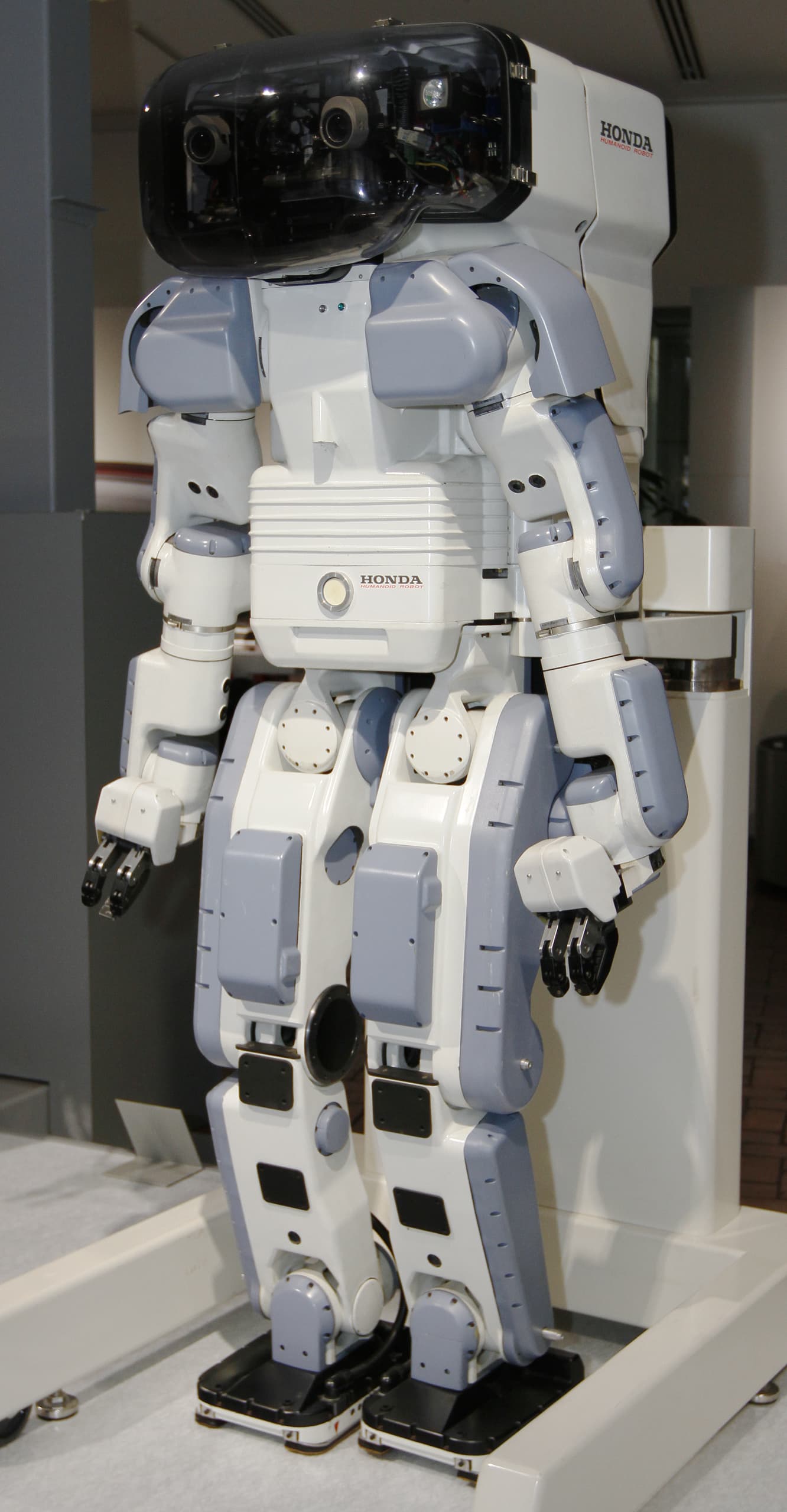
Primo umanoide bipede autonomo e wireless al mondo (1996), ~182 cm, ~210 kg, batteria e computer a bordo.
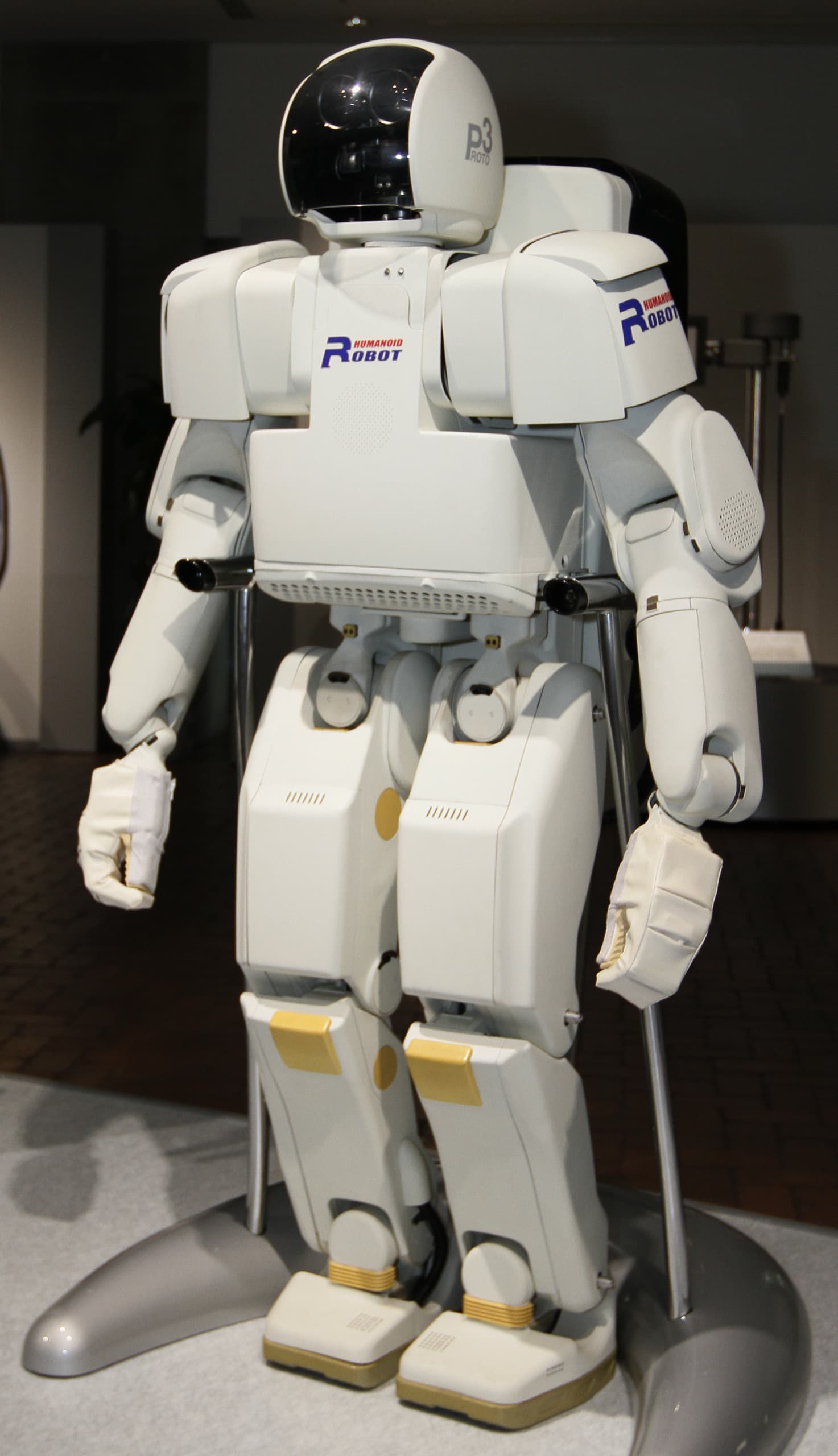
Umanoide bipede completamente autonomo (1997), 160 cm, 130 kg, controllo distribuito per ridurre dimensioni.
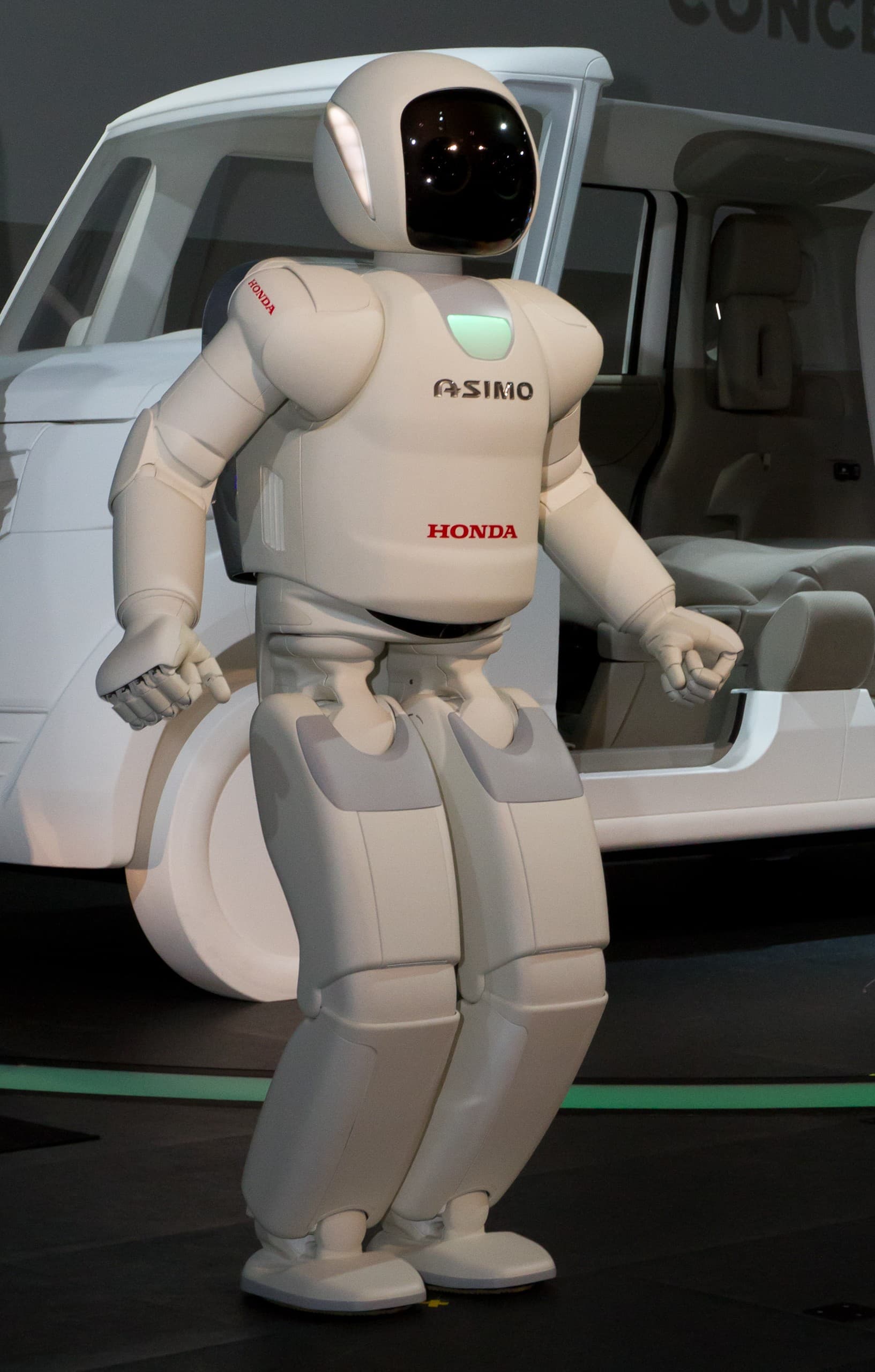
Umanoide bipede iconico Honda, 130 cm, 48-50 kg, 57 DOF, corsa fino a 9 km/h, mani a 13 DOF; progetto chiuso nel 2018.

Prototipo Sony Dream Robot (2000) da ~50 cm con danze Parapara e formazioni multi-robot.

Umanoide Sony da 60 cm, 7,3 kg, 38 DOF, primo umanoide al mondo capace di correre (Guinness 2005); sviluppo chiuso nel 2006.
Umanoide bipede Toyota presentato all'Expo di Aichi 2005, suonatore di tromba (2004) e violino (2007), mani a dita articolate.
Umanoide bipede robusto Kawasaki (dal 2015, gen.9 nel 2025), solleva 18 kg, rimuove scaffali da 30 kg, teleoperazione real-time via HMD.
Umanoide snello Kawasaki derivato da Kaleido, due bracci a 6 assi, base a 4 ruote, occhi a display, batterie litio 600 W.

Umanoide HRP di seconda generazione (2002), 154 cm, ~58 kg, 30 motori, capace di sdraiarsi, rialzarsi e camminare su percorsi stretti.

Umanoide HRP (2006), ~160 cm, progettato per lavorare su superfici scivolose e all'aperto, serra bulloni in remoto.

Umanoide femminile AIST (2009), 158 cm, 43 kg, 44 DOF (8 facciali), canta con Vocaloid e danza con performer umani.
Considerato il primo umanoide a grandezza naturale al mondo (Waseda, 1973), cammina su due gambe, afferra oggetti e dialoga in giapponese semplice.
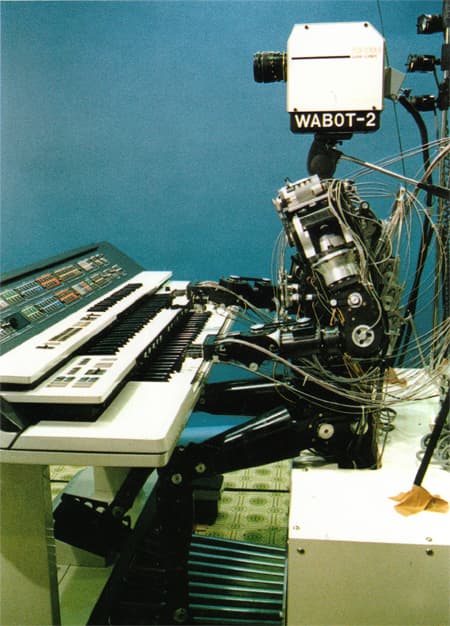
Umanoide musicista Waseda (1984), legge spartiti e suona il pianoforte con mani e piedi, esposto all'Expo di Tsukuba 1985.
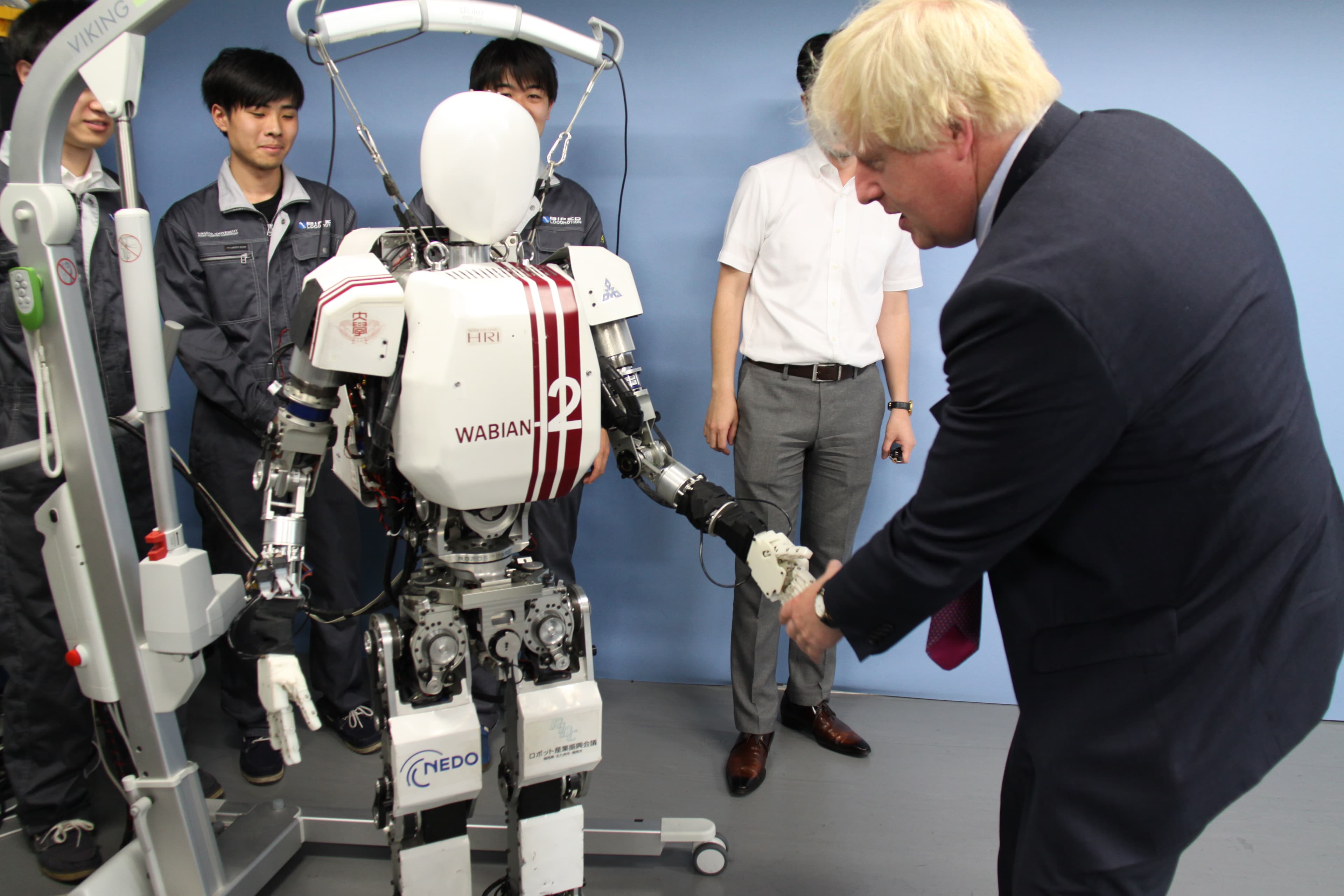
Umanoide bipede Waseda (serie WABIAN, 2R nel 2006), ~150 cm, 41 DOF, camminata umana realistica basata su ZMP.

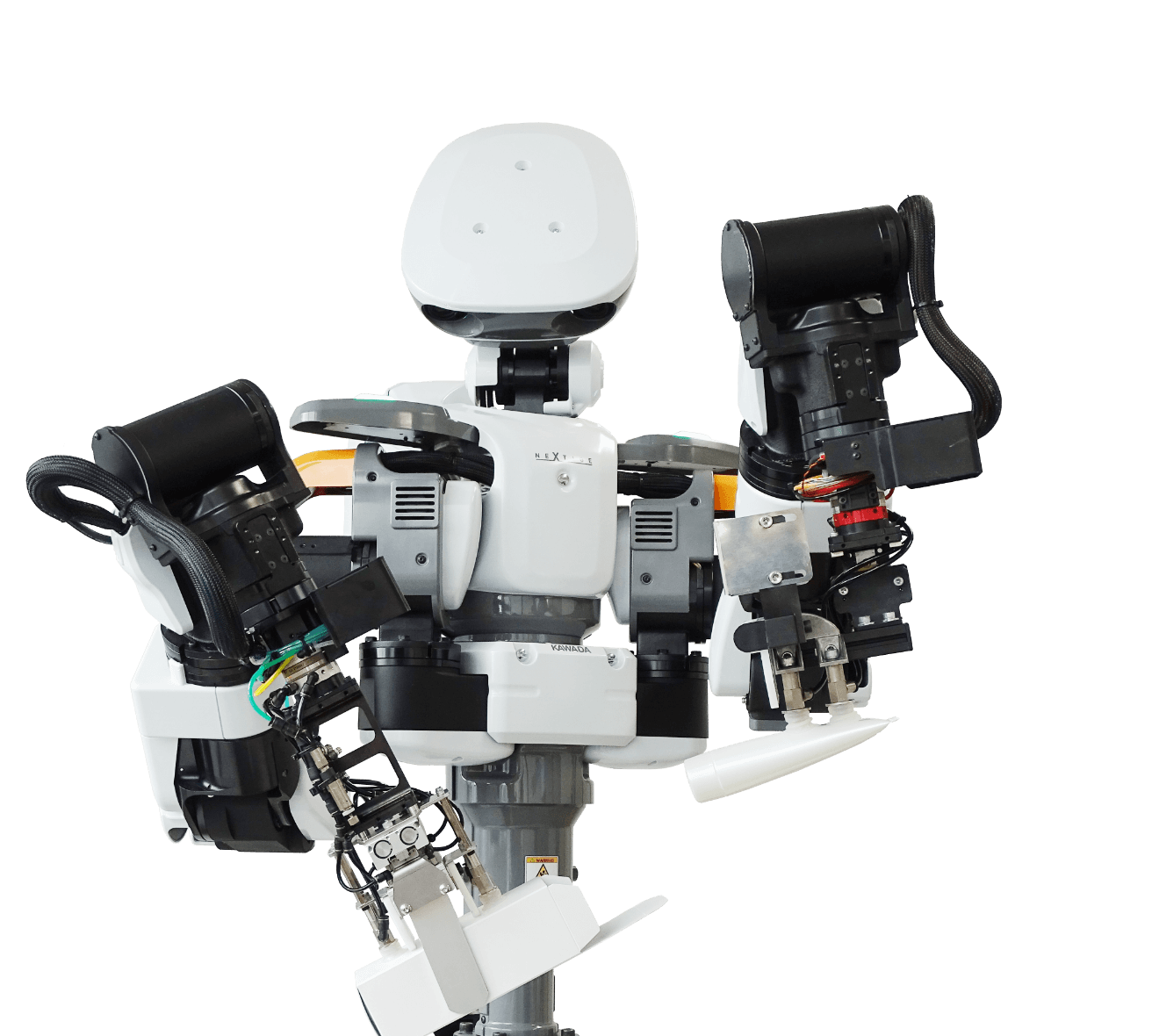
Robot busto-su-piattaforma teleoperato in VR di Telexistence, due bracci articolati e mani complesse per restocking nei convenience store.
Robot di restocking Telexistence con AI NVIDIA, bracci e gripper, operativo in centinaia di convenience store giapponesi; servizio robot-as-a-service..

Robot di servizio Hitachi su base a due ruote auto-bilanciate, 90 cm, 15 kg, fino a 6 km/h, riconoscimento vocale e visivo.

Serie di umanoidi compatti Fujitsu a piattaforma aperta (HOAP-1 2001, -2 2003, -3 2005), ~48-60 cm, per ricerca.

Umanoide comunicativo ATR/Vstone su base omnidirezionale, 108 cm, 35 kg, 13 DOF, telecamere come occhi e microfoni per dialogo.
Piattaforma umanoide Tokyo Robotics (dal 2017), versione bipede con andatura appresa via reinforcement learning; acquisita da Yaskawa nel 2025.
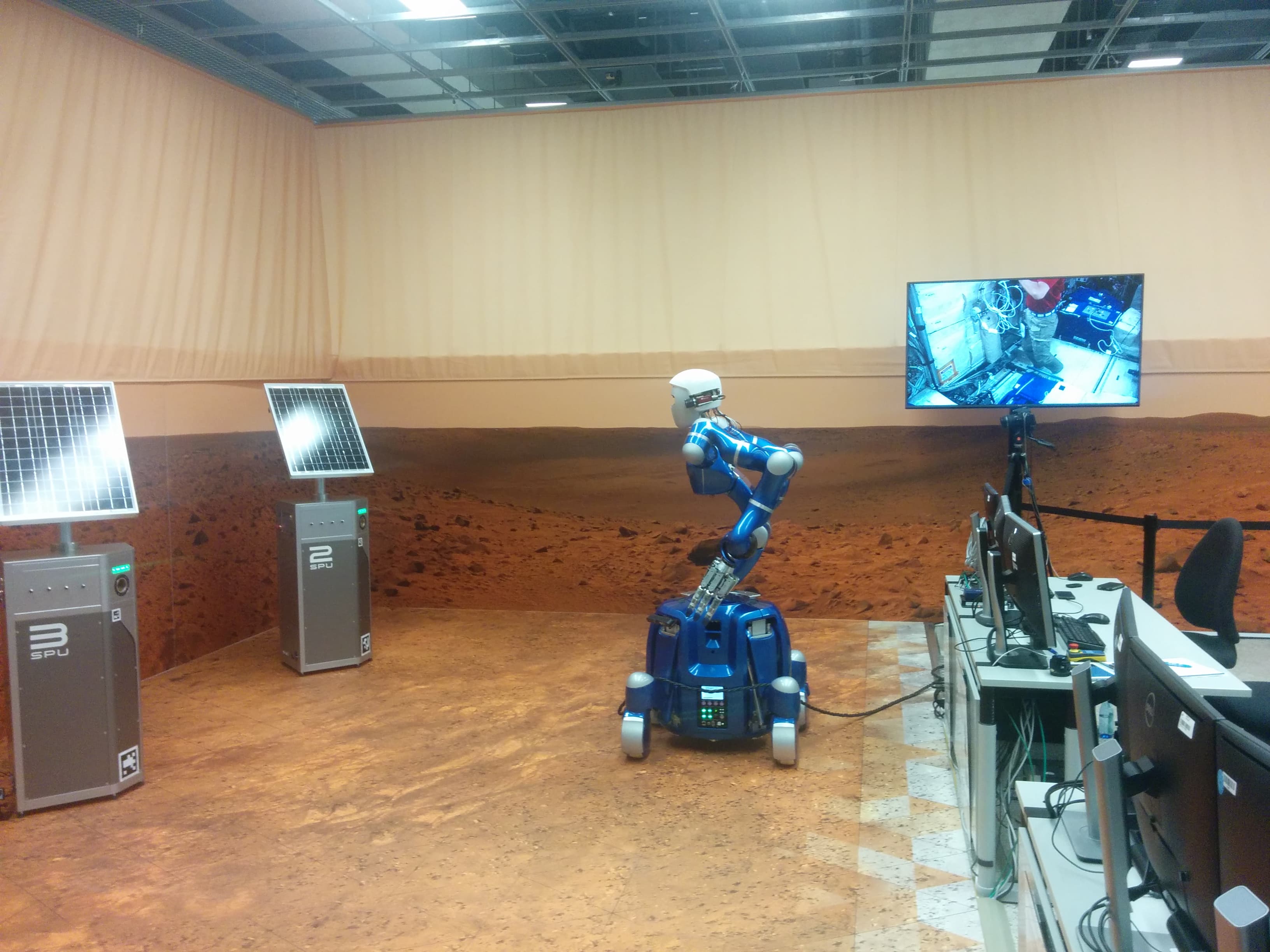
Umanoide general-purpose GITAI per lo spazio, combina AI e teleoperazione per manipolare utensili e quadri di controllo.
Robot avatar dual-arm su ruote di Mira Robotics/ugo, bracci ad altezza regolabile teleoperati, un operatore gestisce fino a 4 unita; noleggio ~1000 $/mese.

Umanoide bipede di ricerca KAIST (2004), 120 cm, 41 DOF, antesignano della serie HUBO, sviluppato per camminata su pavimento domestico.
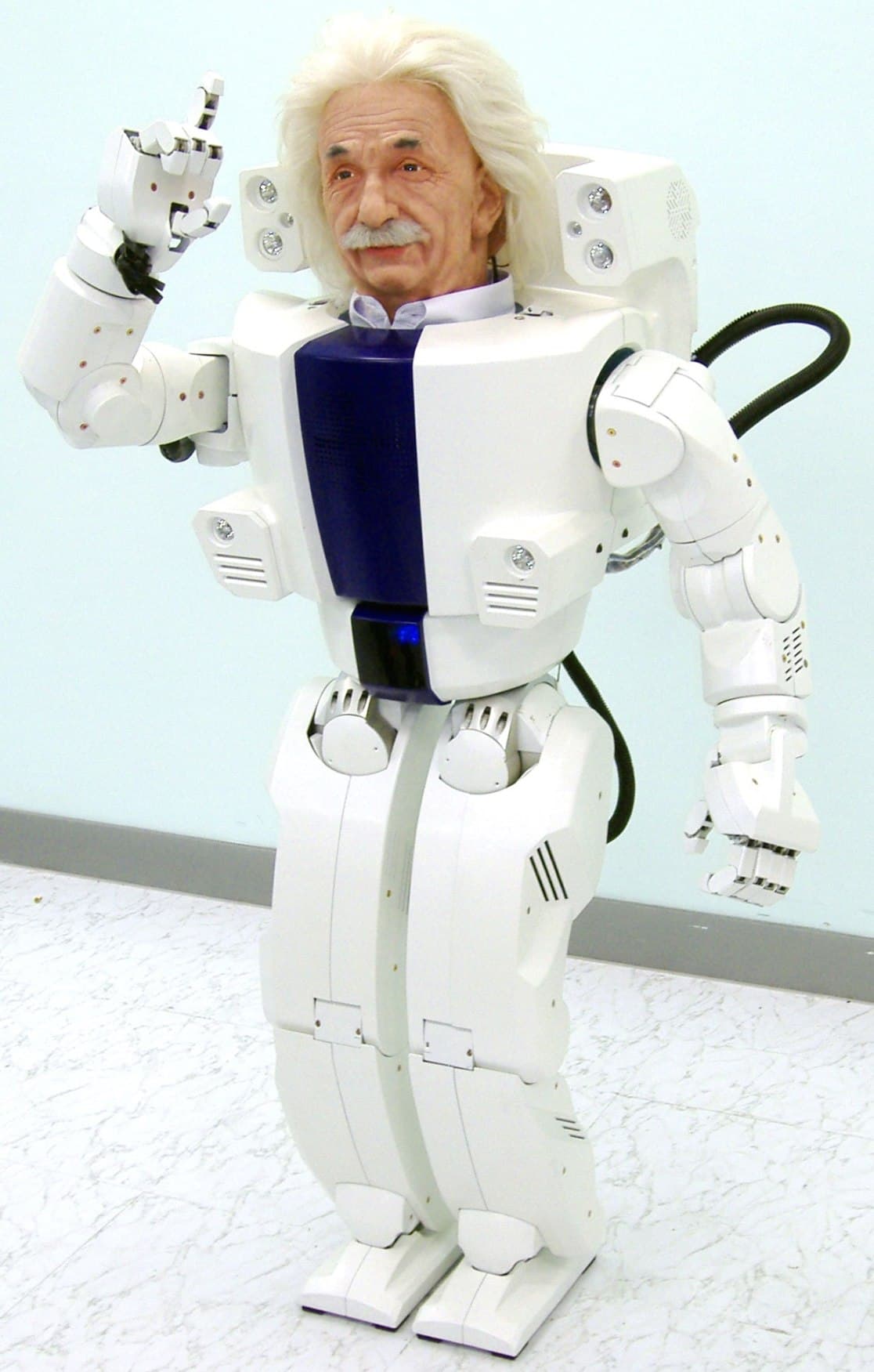
Androide bipede KAIST (2005) con corpo HUBO e testa espressiva tipo Einstein, 137 cm, ~57 kg, fino a 66 DOF inclusi i muscoli facciali.
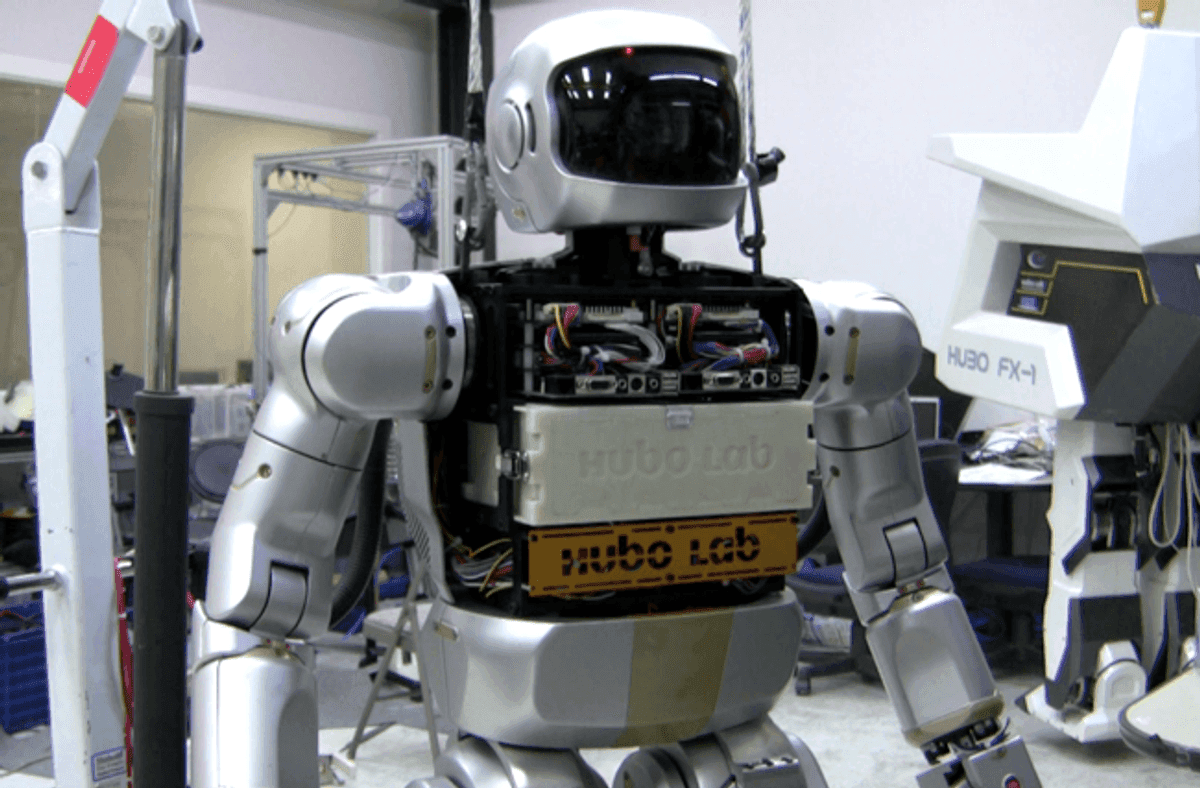
Seconda generazione HUBO di KAIST (2008), 125 cm, ~45 kg, 38 DOF, piu leggera e veloce, usata come piattaforma di ricerca internazionale.
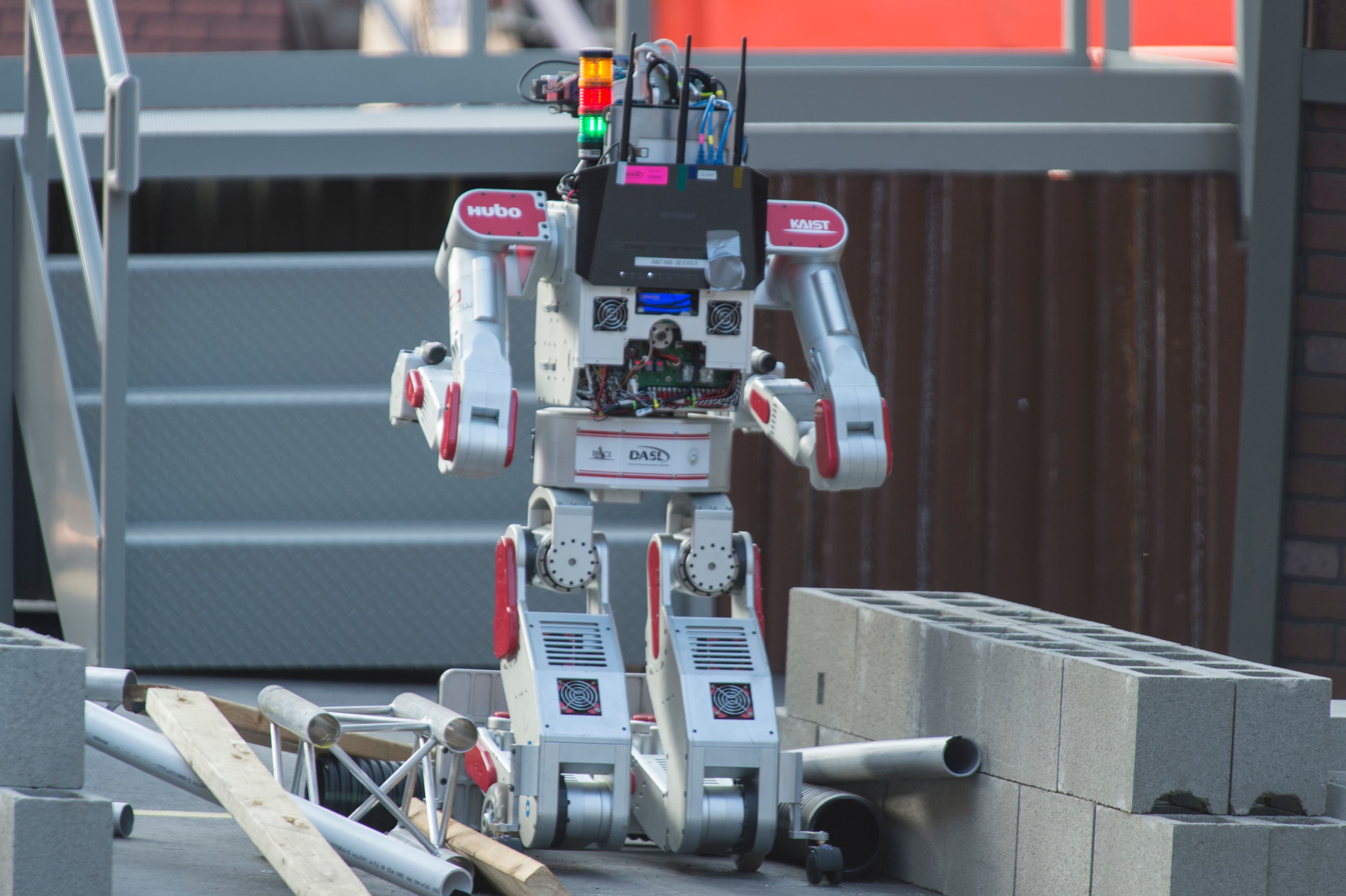
Umanoide trasformabile KAIST/Rainbow (2015), 32 DOF, capace di passare da bipede a base a ruote sulle ginocchia; vincitore della DARPA Robotics Challenge.

Umanoide bipede full-size di AeiROBOT, 160 cm, 45 kg, 41 DOF, con attuatori lineari proprietari gearless e Nvidia Jetson Orin NX; in field trial industriali in Corea.

Semi-umanoide su base a ruote omnidirezionale di AeiROBOT, 31 DOF, pensato per manifattura reale con piattaforma AI industriale.

Umanoide bipede compatto di ROBROS, 154 cm, 56 kg, 31 DOF corpo + 11 DOF mani tendinee, attuatori QDD a bassa riduzione (coppia fino a 150 Nm), camminata addestrata in RL.

Umanoide general-purpose di WIRobotics presentato (busto/parte superiore) ad agosto 2025, mani da 15 DOF e ~700 g, braccia backdrivable a bassissimo attrito, payload >3 kg per mano.

Umanoide su base a ruote (trazione differenziale) di Holiday Robotics, 176 cm, focalizzato sulla manipolazione manuale anziche sulla locomozione bipede.

Umanoide di Blue Robin, 173 cm con proporzioni umane e 32 DOF, braccia con sistema avatar per controllo oggetti, mostrato al CES 2026.
Umanoide full-size open-platform di ROBOTIS, 137,5 cm, 42 kg, 29 DOF con attuatori Dynamixel PRO, sensori F/T e Realsense, su ROS/Ubuntu; disponibile su richiesta di quotazione..
Umanoide miniaturizzato bipede di ROBOTIS, ~46 cm, ~3,5 kg, 20 attuatori Dynamixel XM-430, Intel NUC e camera USB su ROS; piattaforma educativa accessibile.

Umanoide domestico bipede di KIST, 150 cm, ~67 kg, con testa rotante, sei dita e camera 3D, capace di operare elettrodomestici.

Androide di KITECH con torso, due braccia, collo e testa espressiva, 180 cm, addestrato via motion capture; ha co-diretto l'Orchestra Nazionale della Corea.
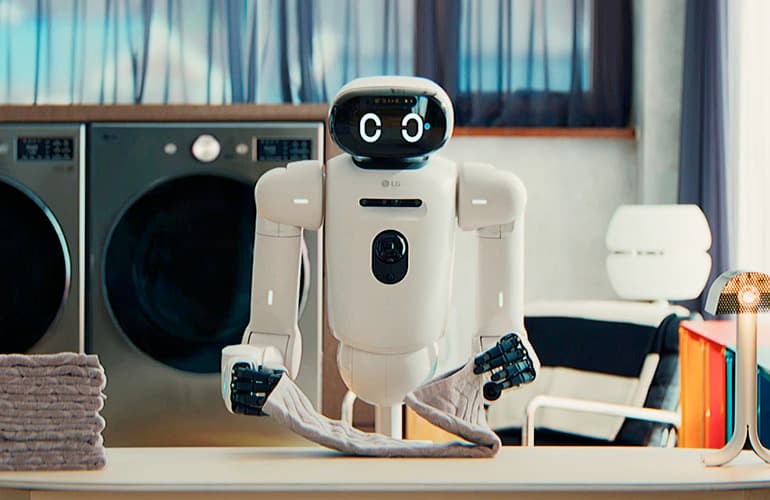
Umanoide domestico bimanuale di LG presentato al CES 2026, corpo umano-simile con due braccia articolate e cinque dita attuate per mano, integrato con piattaforma AI.
Robot bipede di DIDEN Robotics (spin-off HUBO Lab KAIST) con manipolatore superiore per saldatura navale, addestrato via piattaforma AI DIDEN World; prototipo previsto fine 2025.

Umanoide bipede torque-controlled del DLR alto 174 cm, 39 DOF, basato sulle drive unit del braccio leggero KUKA LBR; piattaforma di ricerca su locomozione.
Umanoide del DLR su base a quattro ruote con due braccia e 43 DOF totali, introdotto nel 2009; piattaforma di ricerca su manipolazione destra e telepresenza.

Versione evoluta di Rollin' Justin (2012) su base a ruote con due braccia veloci, ~43 DOF; piattaforma DLR per ricerca su intelligenza artificiale e manipolazione.
Robot antropomorfo del DLR (torso e braccia) con giunti a rigidezza variabile e mani umane a cinque dita; piattaforma di ricerca su compliance e dinamica.
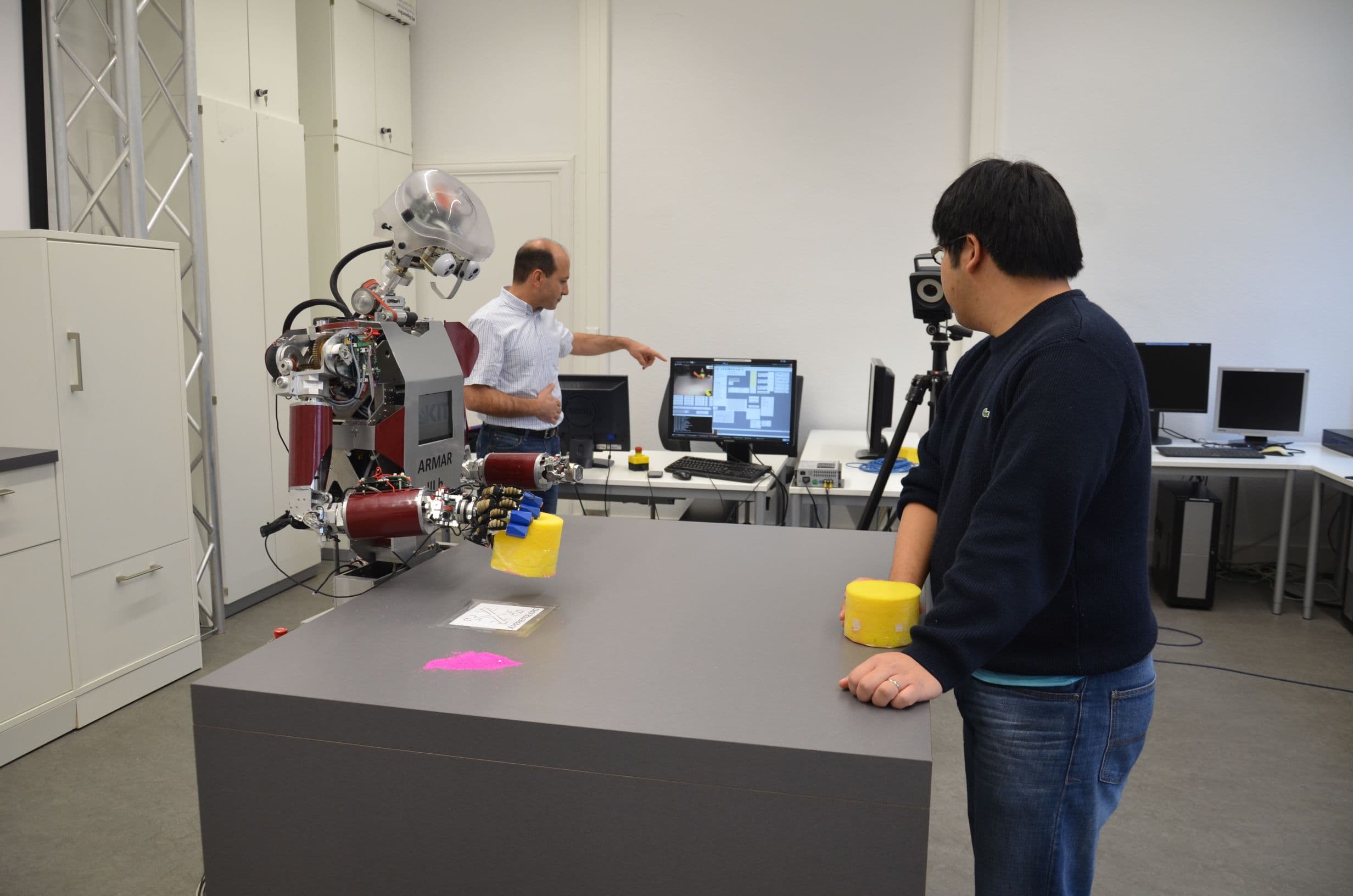
Umanoide del KIT su base a tre ruote con due braccia da 7 DOF e 43 DOF totali, noto per i compiti in cucina; piattaforma di ricerca su controllo sensomotorio.
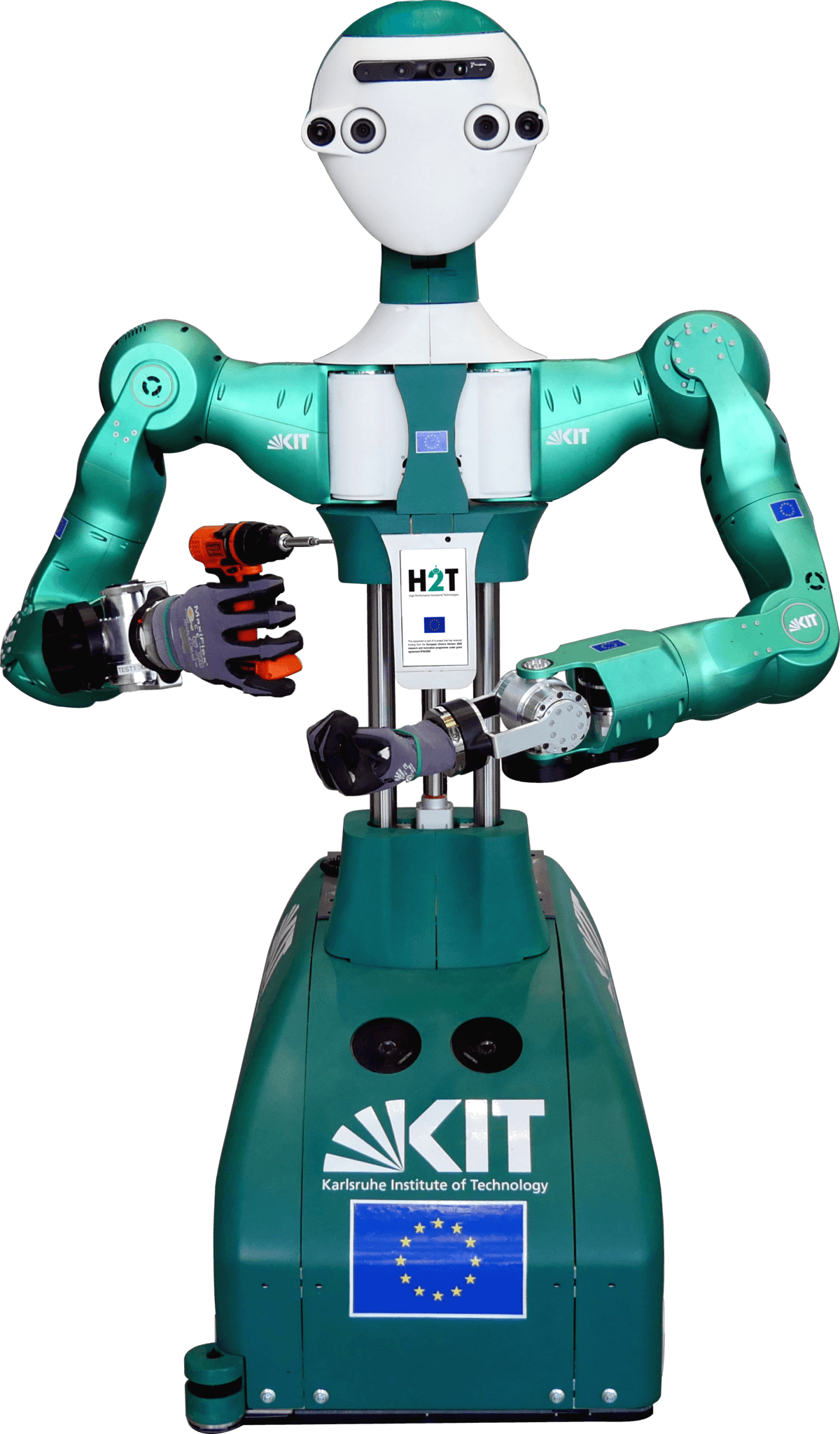
Umanoide collaborativo del KIT per ambienti industriali, altezza regolabile fino a ~192 cm, due braccia da 8 DOF e 10 kg di payload per braccio su base mobile; piattaforma di ricerca.

Ultimo umanoide del KIT con due braccia torque-controlled da 8 DOF, mani a cinque dita sottoattuate, testa con visione stereo e base olonomica; ricerca su apprendimento per dimostrazione.

Robot di servizio cognitivo di Neura (torso e due braccia su base mobile, 18 DOF) per casa, retail e cura; prenotabile, ~9.999 EUR.

Umanoide industriale di Agile Robots (Monaco) alto 174 cm, 71 DOF, payload 20 kg, mani con 21 giunti e sensori tattili; produzione in Baviera dall'inizio 2026.

Umanoide bipede adult-size della University of Bonn alto 135 cm, 18 DOF, struttura 3D-printed; piattaforma di ricerca per RoboCup.
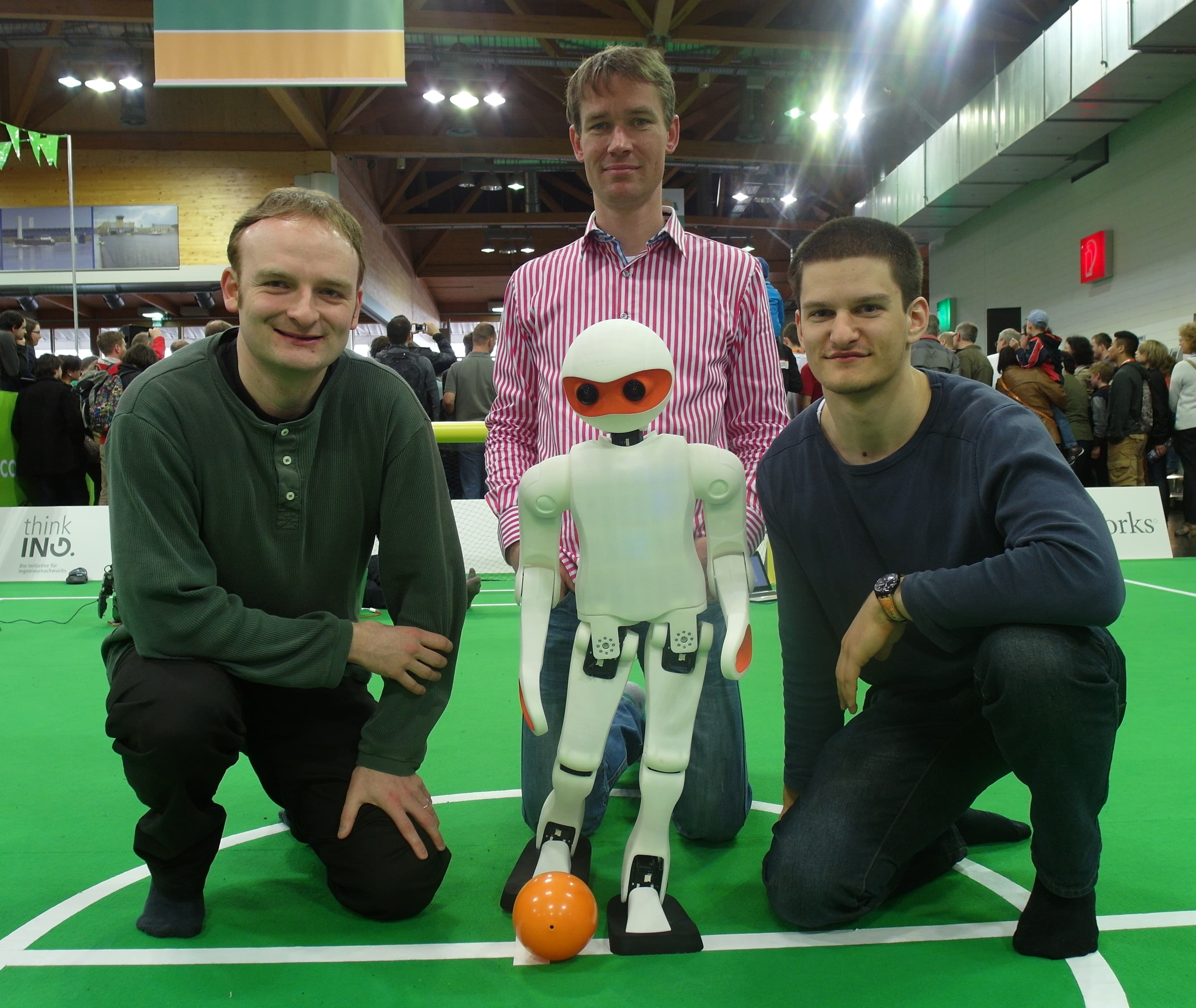
Umanoide child-size (92 cm) interamente 3D-printed e open-source, sviluppato da igus (Colonia) con la University of Bonn; piattaforma di ricerca.

Umanoide di igus (Colonia) alto 170 cm su base mobile a ruote con due bracci ReBeL e mani bioniche, payload fino a 100 kg, certificato CE e in vendita a ~47.999 EUR.

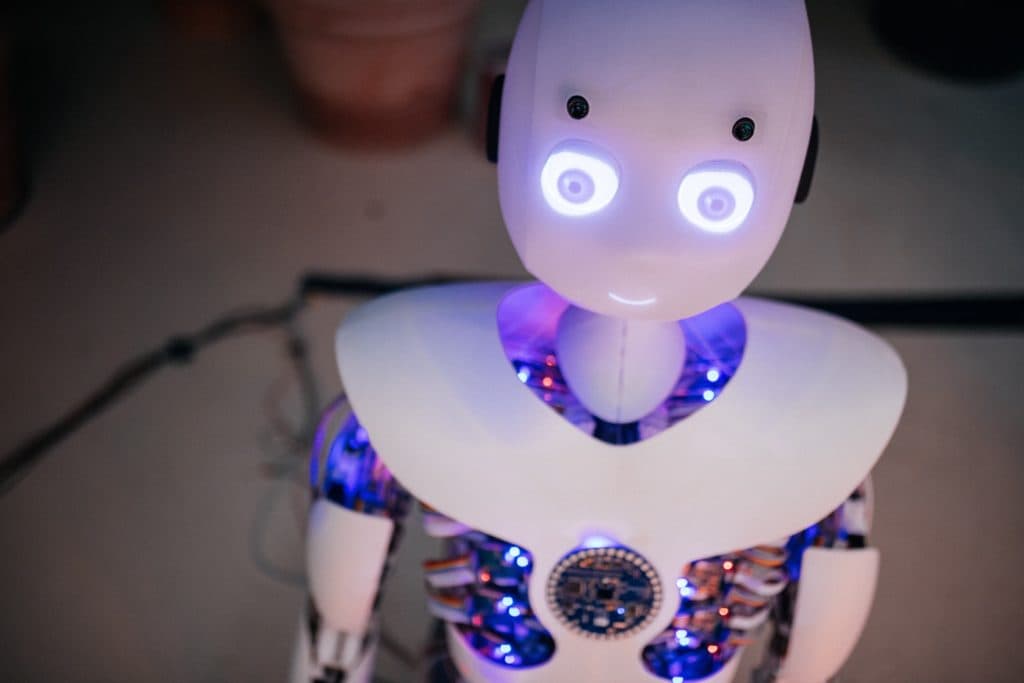
Umanoide bipede da ricerca alto 146 cm, 37 DOF, ~40 kg, progettato da Aldebaran per assistenza agli anziani; mai commercializzato.
Versione precedente dell'umanoide open-source Reachy: torso, testa interattiva e due braccia bioniche 7-DOF (3 kg) con gripper, su base mobile o fissa.

Umanoide social alto 123 cm, 26 DOF, su base sferica brevettata a 3 DOF, 1,5 kg per mano e traino fino a 15 kg, batteria 4 ore; gia consegnato a clienti in retail e sanita in Francia..
Umanoide di reception su base mobile con LiDAR e navigazione SLAM, testa e torso con tablet, microfoni e speaker, sistema operativo ZBOS di Zorabots (hardware Siasun); commercializzato in oltre 60 paesi..
Umanoide da ricerca adult-size alto 134 cm, ~30 kg, con testa, torso, due braccia e due gambe (6 DOF per gamba), visione stereo, sviluppato alla TU Eindhoven per RoboCup.
Umanoide a grandezza naturale (175 cm, oltre 30 assi di movimento) animatronico interattivo su base fissa, parla 30+ lingue via OS Tritium; venduto a science center in tutto il mondo.

Umanoide a corpo intero con pelle in silicone modellata da scansioni 3D di persone reali e collo a vertebre articolate, focalizzato su espressivita facciale fotorealistica; realizzato su commessa.

Umanoide bipede dinamico a grandezza naturale in sviluppo (4a iterazione), gambe biologicamente analoghe con linkage anca-ginocchio biarticolare per camminare, correre e saltare, testa a display proiettivo; prototipo non in vendita.

Social-robot a busto fisso con volto proiettato e braccia non funzionali (versione Kiosk con touchscreen e base da 1,2 m); statico, pensato per interazione conversazionale.
Mobile manipulator umanoide su base a ruote (220 cm, 29 DOF, payload 15 kg con due braccia, fino a 7,2 km/h), mani a 5 dita 12-DOF o gripper; testato in POC presso Siemens e Ford, non in vendita.
Umanoide bipede (179 cm, 90 kg, 29 DOF, payload 15 kg, 1,5 m/s) capace di camminata omnidirezionale, squat, salto e push-recovery, costruito in 5 mesi e stabile dopo 2 giorni di training; prototipo non in vendita.
Umanoide a doppio braccio su base a ruote (payload 10 kg, fino a 2,4 m/s, autonomia 8 h con batterie hot-swap) con apprendimento per dimostrazione; primo deployment live in impianto di riciclo vetro, non ancora in vendita generale.

Robot socialmente assistivo umanoide (circa 152 cm, testa a schermo + braccia mobili) su base a tre ruote, sensori laser/depth/tattili, spinout del Trinity College Dublin; prototipo di ricerca non commercializzato.
Umanoide da ricerca (Bristol Elumotion Robot Torso 2): torso a 4 giunti con 2 braccia e mani prensili, volto digitale espressivo e pelle artificiale sensibile, su base fissa; piattaforma accademica non in vendita.

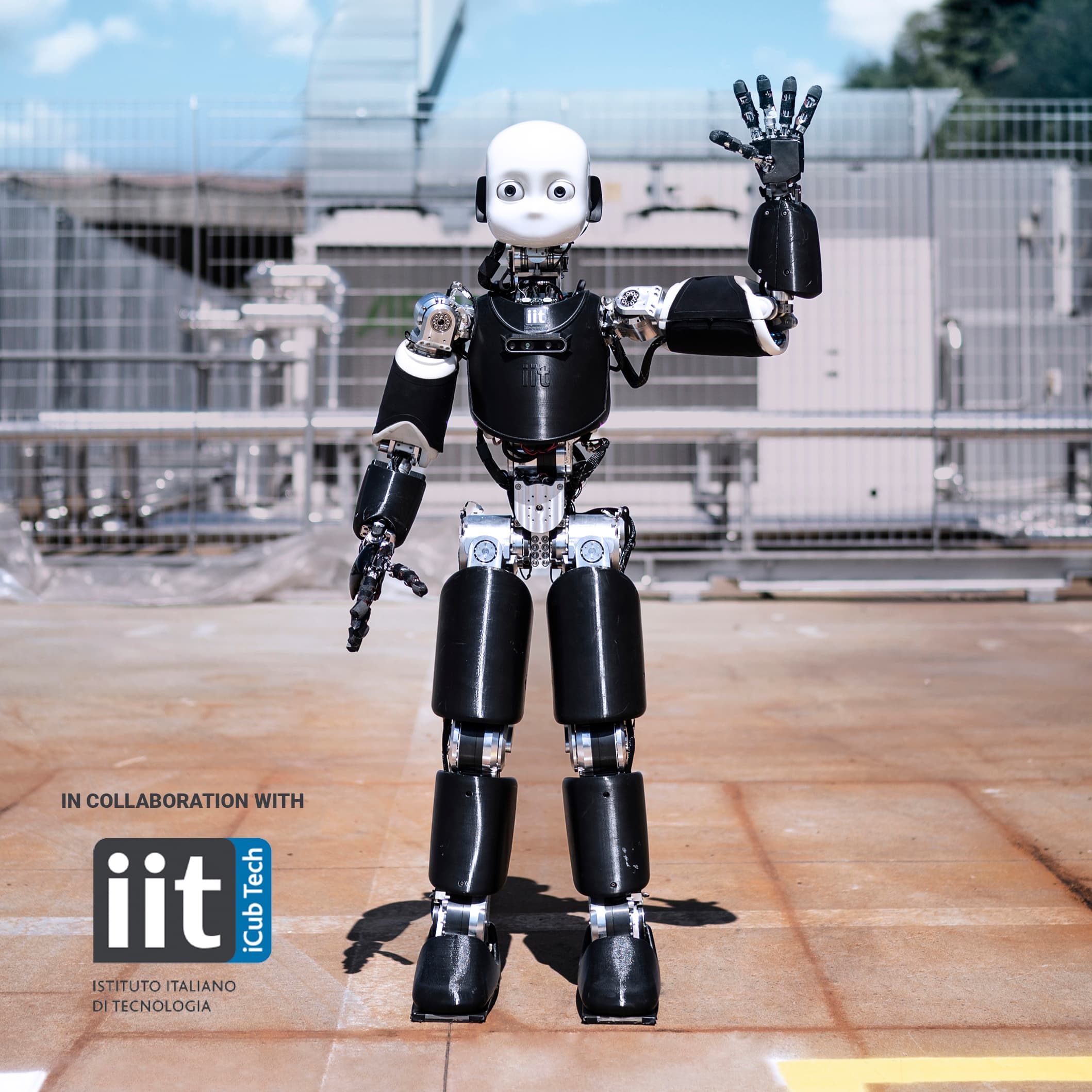
Umanoide di taglia infantile alto ~104 cm con 53 DOF (38 nel busto/braccia/mani), payload ~1,5 kg per mano; piattaforma di ricerca matura distribuita in decine di istituti nel mondo..
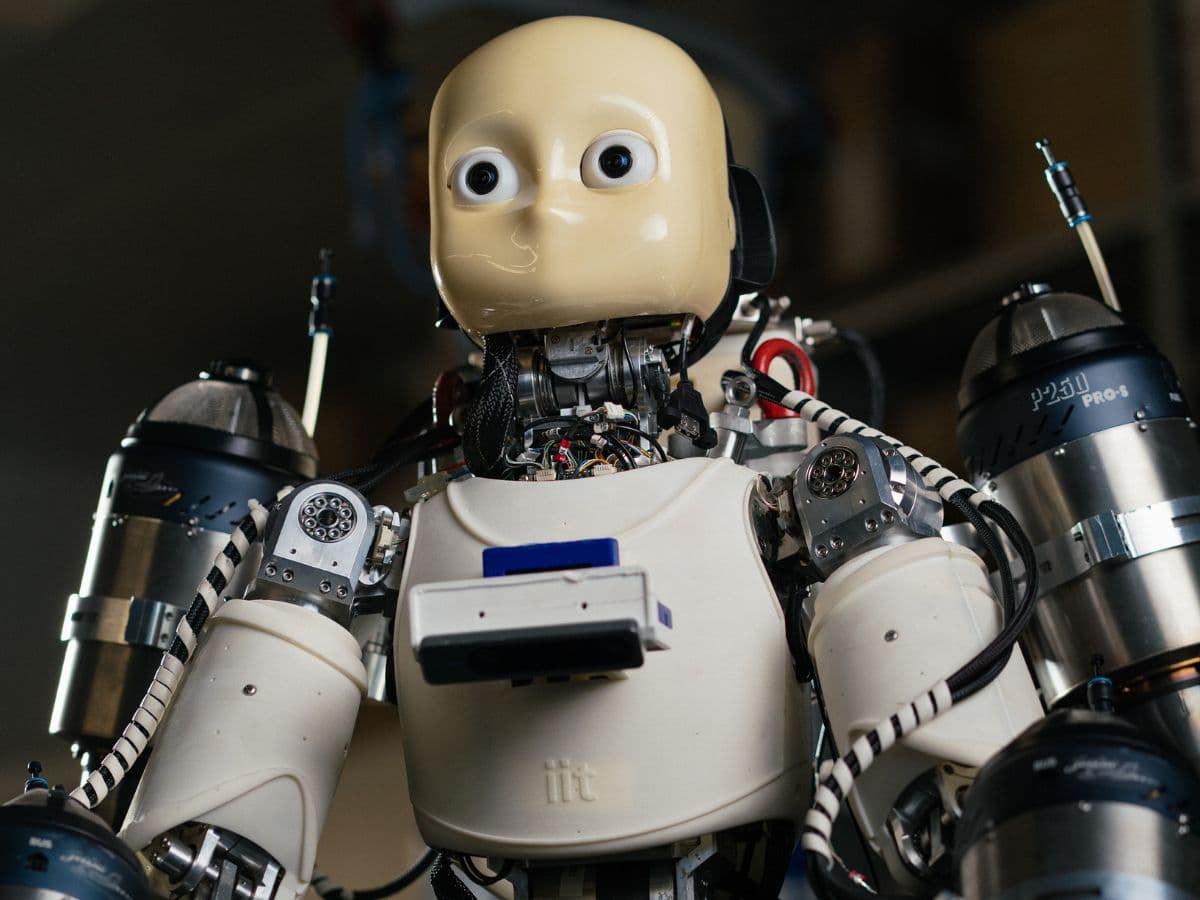
Evoluzione full-scale dell'iCub alta 125 cm, ~52 kg, 54 DOF, usata come sistema avatar per teleoperazione immersiva; piattaforma di ricerca.
Umanoide compliant alto 95 cm e ~31 kg con 23 DOF e attuatori elastici a serie; primo umanoide full-body a unire torque sensing e compliance passiva.

Umanoide full-size alto 185 cm e 102 kg con 33 DOF e mani a 19 DOF, payload 10 kg per braccio, autonomia ~2 h; piattaforma di ricerca per disaster response (DARPA Robotics Challenge).

Umanoide alto 150 cm e 55,7 kg con 54 DOF e payload ~10 kg, progettato con INAIL per ridurre il rischio ergonomico nei magazzini; piattaforma di ricerca.
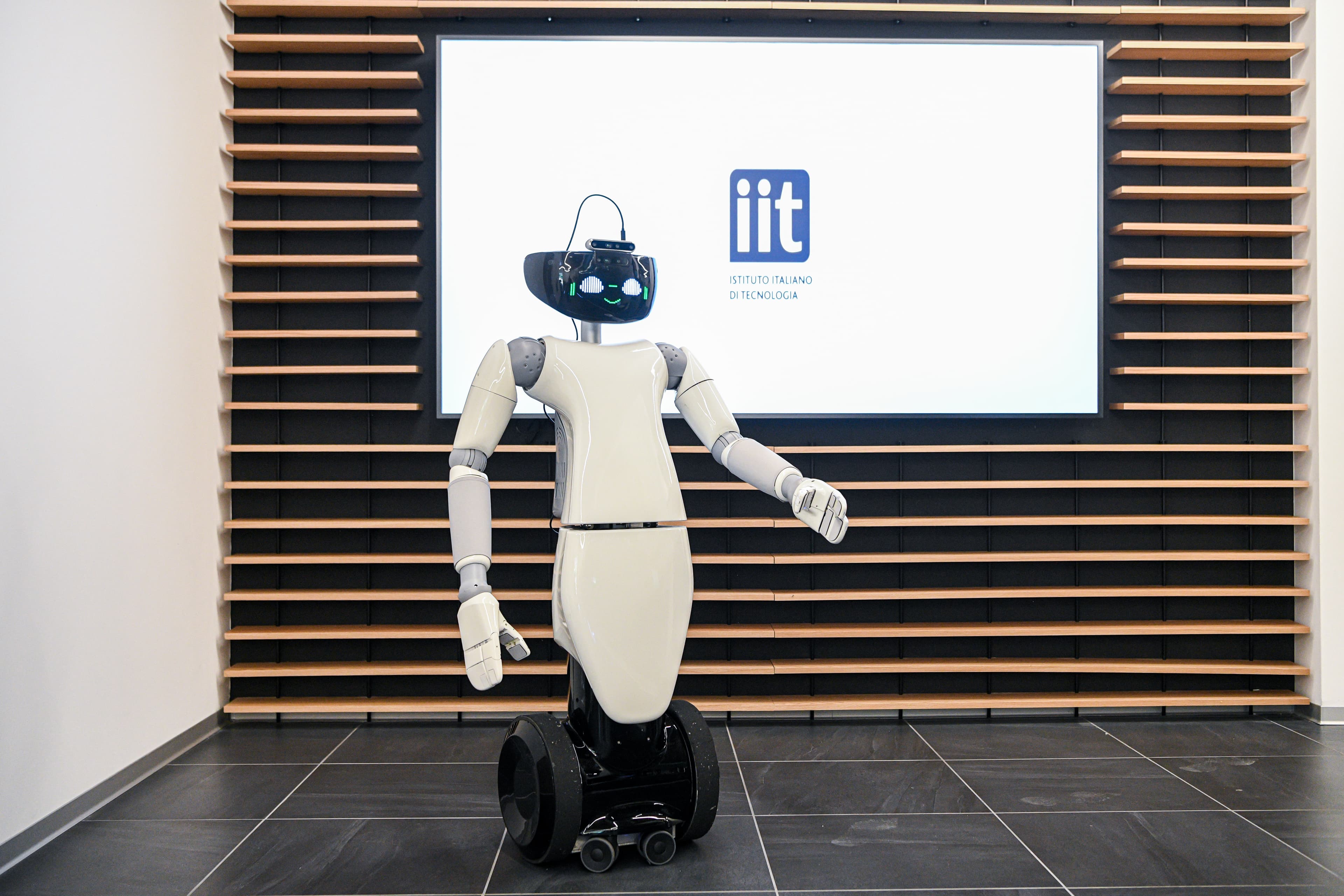
Umanoide di servizio su base a ruote alto 125 cm (busto estensibile 115-145 cm), ~50 kg, mani a guanto con payload ~1,5 kg, pensato come robot di servizio accessibile.
Umanoide volante a getto basato su iCub, alto ~100 cm (~70 kg con motori), con 4 turbine (>1000N di spinta) su braccia e jetpack; primo umanoide al mondo a decollare.
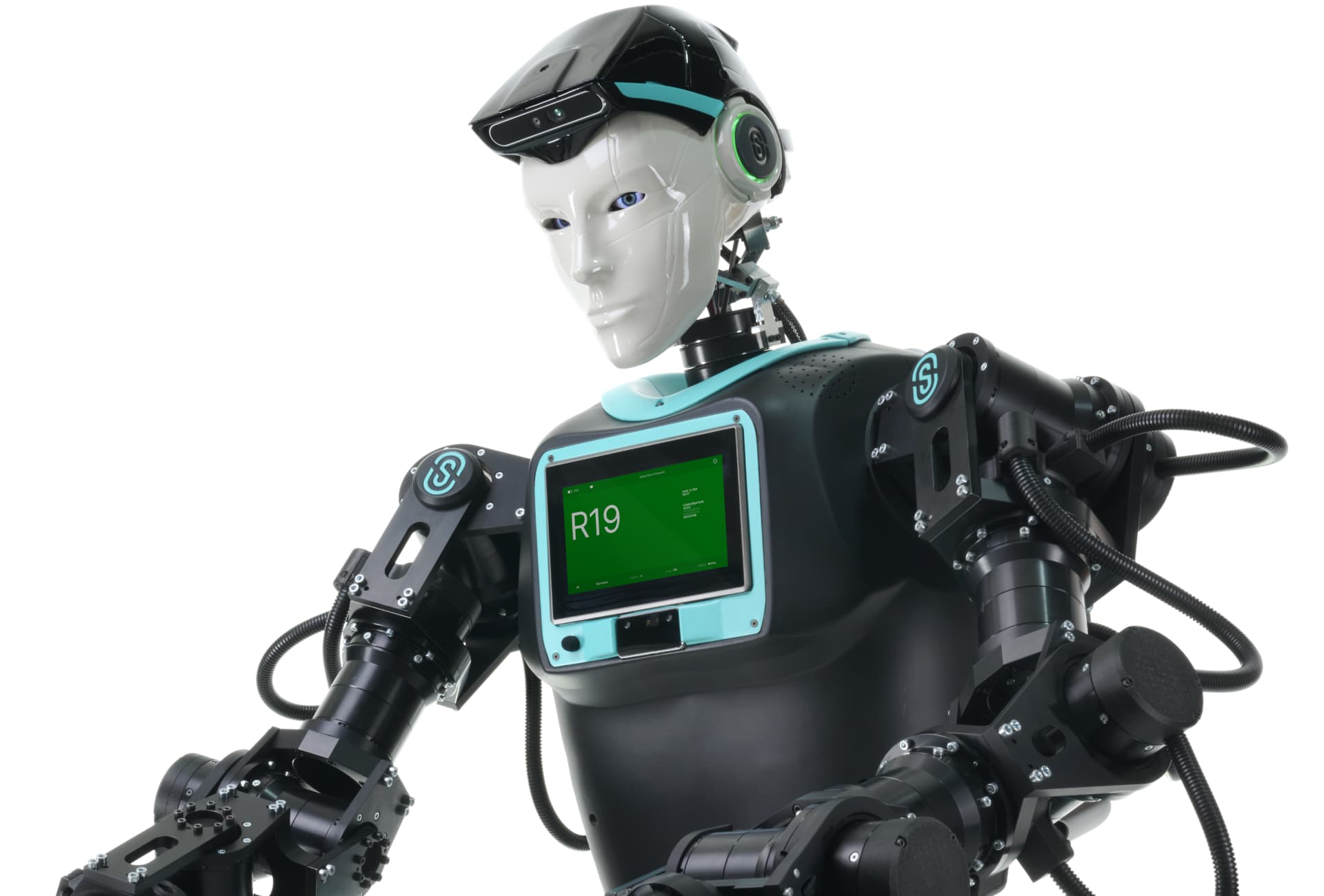
Umanoide cognitivo italiano alto 175 cm e 80 kg con 40 giunti, payload 10 kg e reach 90 cm, mobilita autonoma a 1,2 m/s; certificato per uso industriale e sanitario, gia in deployment (accordo con STMicroelectronics)..
Umanoide industriale 'Made in Italy' di spin-out IIT (luglio 2024, round da 70 mln EUR), basato su tecnologie iCub/ergoCub/iRonCub; concept presentato al CES 2026, primi deployment industriali previsti per il 2026.

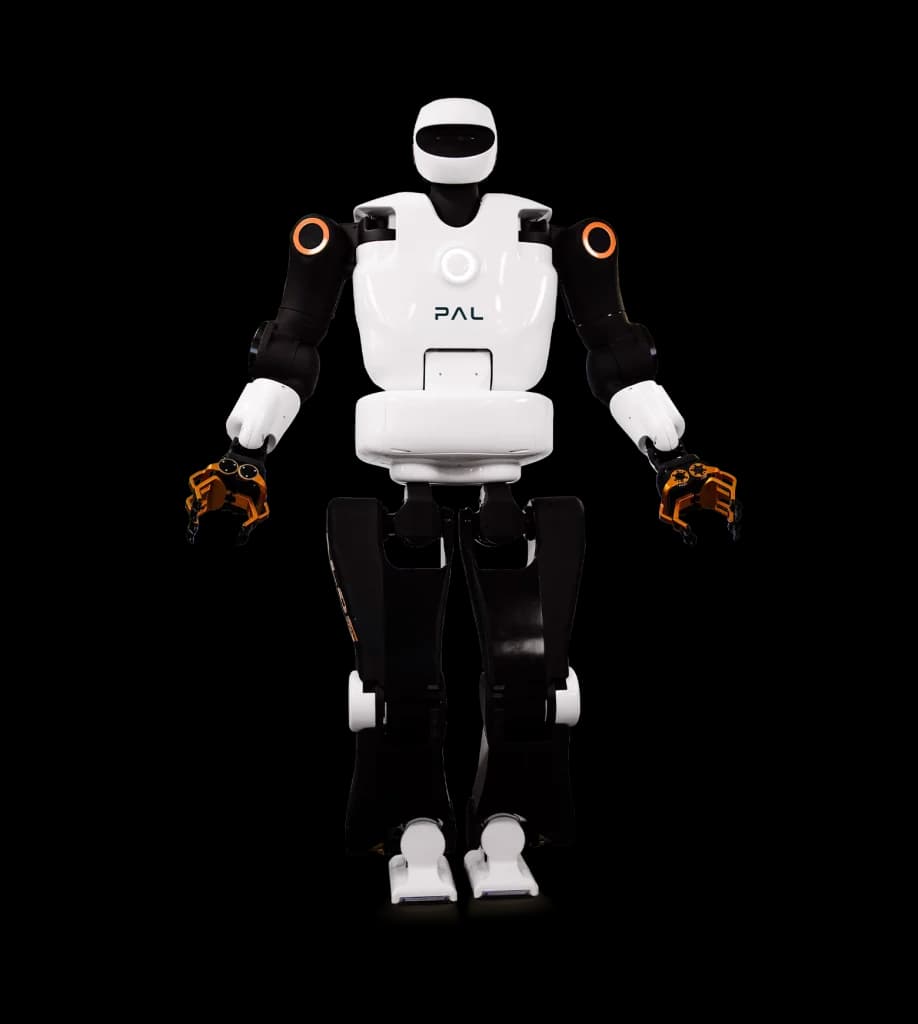
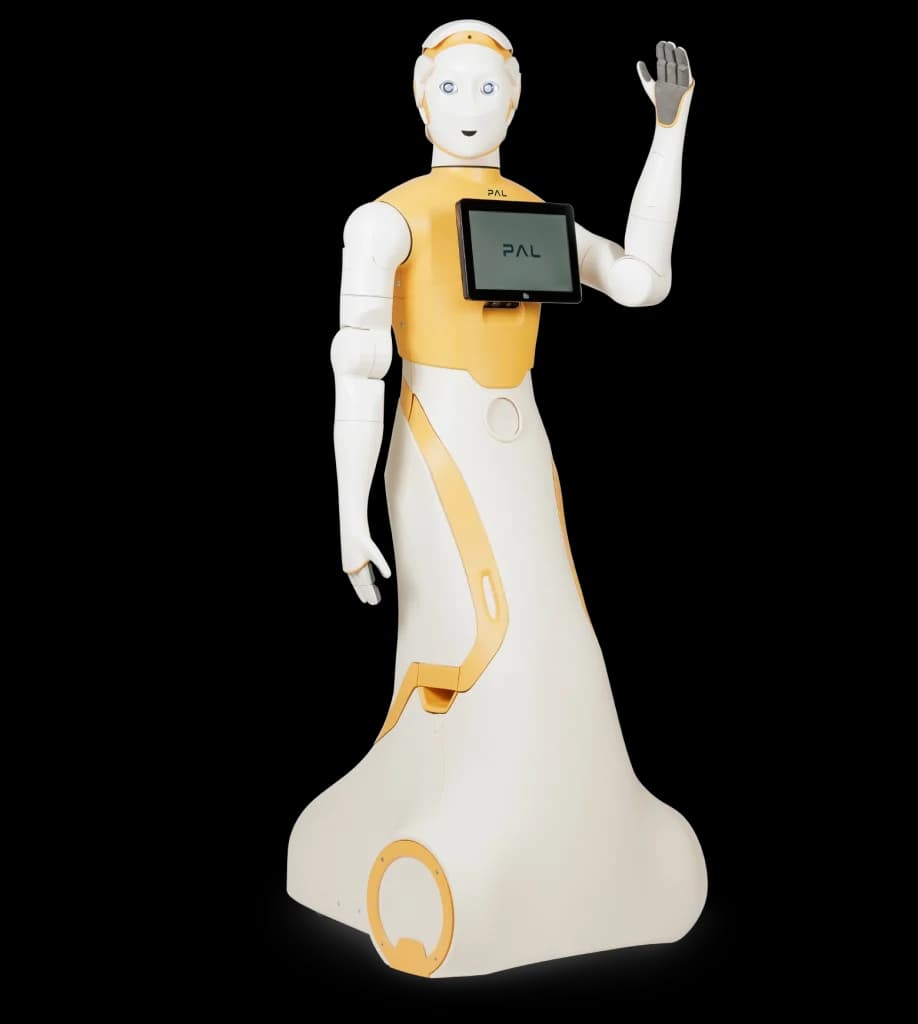
Umanoide di servizio su base a ruote alto 170 cm e 90 kg con 22 DOF (4 km/h), torso con touchscreen e due braccia, payload fino a 30 kg sul dorso; prototipo dimostrativo PAL Robotics.

Primo umanoide bipede di PAL Robotics (2005), alto 140 cm e 49 kg con 30 DOF, capace di camminare; prototipo di ricerca non commercializzato.

Umanoide bipede PAL Robotics (2008), alto 147 cm e 64 kg con 41 DOF, in grado di camminare e sollevare carichi; prototipo di ricerca non commercializzato.
Robot social umanoide su base a ruote alto 165 cm, con touchscreen 10.1", riconoscimento vocale in oltre 30 lingue e autonomia 8-12 h; piattaforma commerciale per accoglienza e HRI..

Umanoide da hospitality (torso, testa e braccia articolate) alto fino a 200 cm e ~80 kg con 22 DOF, touchscreen e pagamento integrato, fino a 300 drink/ora; prodotto commerciale dispiegato nel F&B..
Primo umanoide industriale costruito in Grecia: base mobile autonoma con due braccia robotiche, dita destre, telecamere e interazione vocale; pensato come 'lavoratore industriale', presentato in anteprima nel 2026.

Iterazione R&D 2025 dell'umanoide bipede NEO, alta 165 cm e ~30 kg, attuazione tendon-drive con cover morbide e suit in maglia di nylon, LLM proprietario per conversazione; non in vendita, solo sviluppo.

Umanoide di servizio su base a 2 ruote, alto ~158 cm (estensibile a 206 cm), 2 braccia con 6-7 DOF, riconoscimento facciale, scansione documenti e pagamenti; oltre 800 unita operative in 47 paesi.
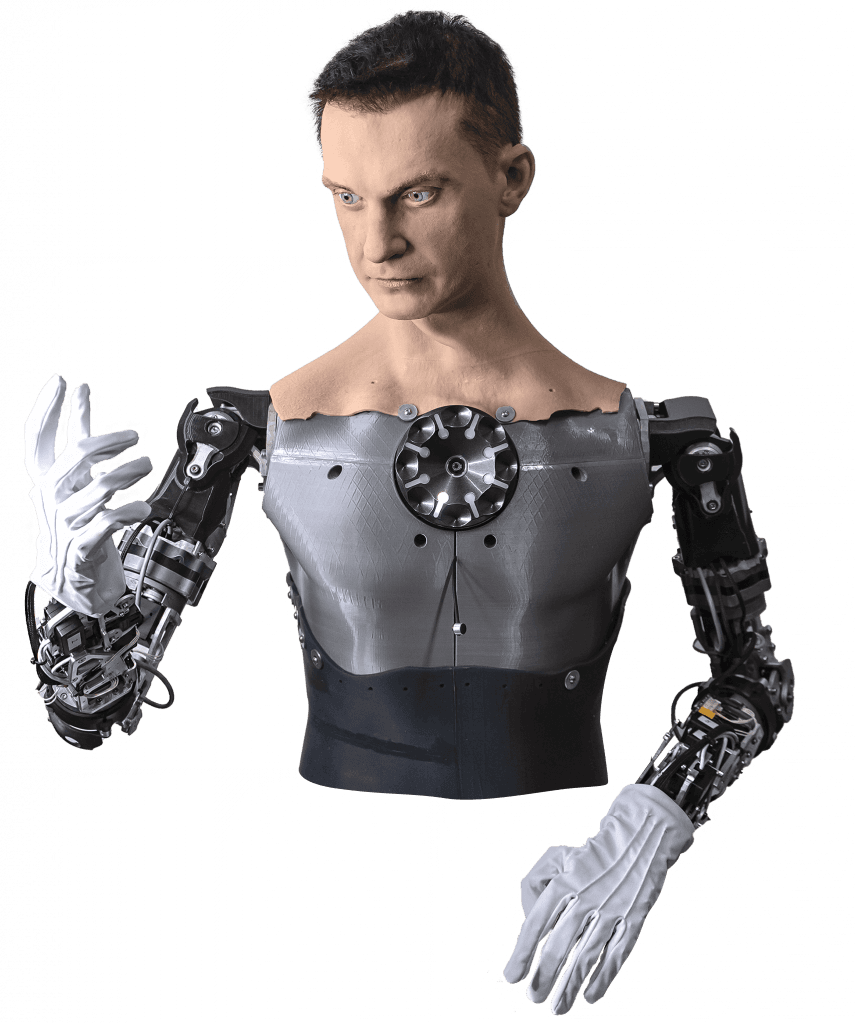
Android antropomorfo statico (non cammina) con pelle in silicone, 12 DOF per braccio + 3 DOF collo + 3 DOF torso, ~600 micro-espressioni facciali, manipolazione fino a 1 kg; venduto su misura.
Umanoide bipede a grandezza naturale (~180 cm) sviluppato per ambienti ostili; opera in teleoperazione (tuta di controllo + VR) o in modalita autonoma, ha volato verso la ISS nel 2019.
Uno dei primi umanoidi full-size russi (147 cm, 56 kg, 36 DOF) capace di camminare, parlare e manipolare oggetti; progetto di ricerca svelato nel 2008.
Umanoide antropomorfo (144 cm, 65 kg, 57 DOF di cui ~41-43 attivi) con torso, testa, due manipolatori a dita e due gambe; piattaforma di ricerca.

Umanoide bipede (186 cm, 95 kg, 67 DOF) con 19 servomotori facciali, payload 10 kg, velocita 6 km/h, 6 h di autonomia, operativo anche offline; prototipo ~77% componenti russi, debutto (con caduta) a Mosca nov 2025.
Umanoide bipede con ~40 DOF, mani a 5 dita, 10 sensori visivi e IMU/sensori di forza per l'equilibrio, guidato dall'LLM GigaChat; piattaforma di test presentata da Sber a Mosca nov 2025, non in vendita.

Robot-hostess antropomorfo (~165 cm, 65 kg) con braccia articolate, riconoscimento facciale e mobilita su tecnologia a ruote; modello capostipite di AKINROBOTICS, prodotto nella prima fabbrica di umanoidi al mondo a Konya.
Umanoide sociale su base a ruote (123 cm, 45 kg) con braccia a 3 assi, 2 lidar per navigazione autonoma, sensori di urto/caduta e supporto multilingua; in servizio all'aeroporto di Istanbul e prodotto in serie..
Umanoide sociale su ruote con rotazione a 360 gradi (0,6 m/s), braccio a 4 assi con presa, volto LED animato, navigazione autonoma via lidar e camere di profondita, risposte AI in 15 lingue; pronto al servizio..

Umanoide bipede (150 cm, 48 kg) con 2 gambe a 6 assi capaci di camminare, cambiare direzione e salire scale, mano ergonomica a 5 dita, 12 motori facciali e ~5 h di autonomia; prototipo della serie AKINCI.

Android antropomorfo a muscoli artificiali (Myofiber) e organi sintetici pensato per la casa; annunciato in pre-ordine da Clone Robotics (Wroclaw) con prime ~279 unita previste, non ancora consegnato.

Robot umanoide spaziale a mezzo busto (testa, torso, braccia, niente gambe) sviluppato da ISRO al Vikram Sarabhai Space Centre per la missione Gaganyaan: legge display, preme interruttori, opera fino a 6 pannelli e monitora pressione/temperatura/CO2.

Umanoide di servizio su ruote alto 150 cm, ~50 kg, di Invento Robotics (Bangalore, fondatore Balaji Viswanathan): riconoscimento facciale, NLP multilingue, navigazione laser-guidata con LIDAR/ultrasuoni e 10 ore di autonomia.

Semi-umanoide di servizio su base mobile alto ~170 cm, ~75 kg, di iHub Robotics (Kochi, Kerala): parla oltre 100 lingue, navigazione autonoma SLAM con obstacle avoidance su aree fino a 400.000 sqft, LLM per conversazione e riconoscimento emozioni.

Piattaforma umanoide di servizio multiuso di Asimov Robotics (Kochi, Kerala, fondata 2012, acquisita da Zoho): forma e comportamento human-like, personalizzabile per hospitality, security, retail, sanita, educazione e banking; base della variante KP-Bot per la Kerala Police..

Umanoide poliziotto alto ~170 cm (5'7"), ~43 kg, di H-Bots Robotics (Hyderabad): visione a 360 gradi, sensori ultrasonici/prossimita/temperatura, parla inglese/hindi/telugu, riceve denunce e identifica sospetti.

Umanoide bipede AI-powered di Kody Technolab (Ahmedabad): locomozione bipede e interazione conversazionale human-like, presentato a Vibrant Gujarat 2024 e Gujarat Police Expo 2024.

Umanoide general-purpose di Addverb Technologies (Noida, backed Reliance), annunciato per il 2025: elabora dati multimodali (vista, audio, tatto) con algoritmi di self-learning per task in magazzini, difesa e sanita.

Umanoide industriale function-first su base a ruote di Ati Motors (Bangalore): braccia in fibra di carbonio che sollevano 12 kg a 1 m di estensione (target futuro 35 kg), toolhead intercambiabili e camere integrate nelle mani.
Variante industriale della serie Spaceo di Muks Robotics (Pune): capacita di carico piattaforma 200 kg, braccia con 7 DOF che sollevano 10 kg, GPU NVIDIA Ampere 2048-core e sistema AGI FusionMax, oltre 4 ore di autonomia.
Variante di servizio della serie Spaceo di Muks Robotics (Pune) alta 1,67 m su base mobile (~7 km/h): AI conversazionale multilingue e riconoscimento emozioni per mall, uffici e ospedali.

Umanoide general-purpose con architettura software-defined di Svaya Robotics (Hyderabad, fondata 2018): cobot e umanoidi per automatizzare task fisici in manufacturing, logistica e warehousing; collaborazioni con DRDO.
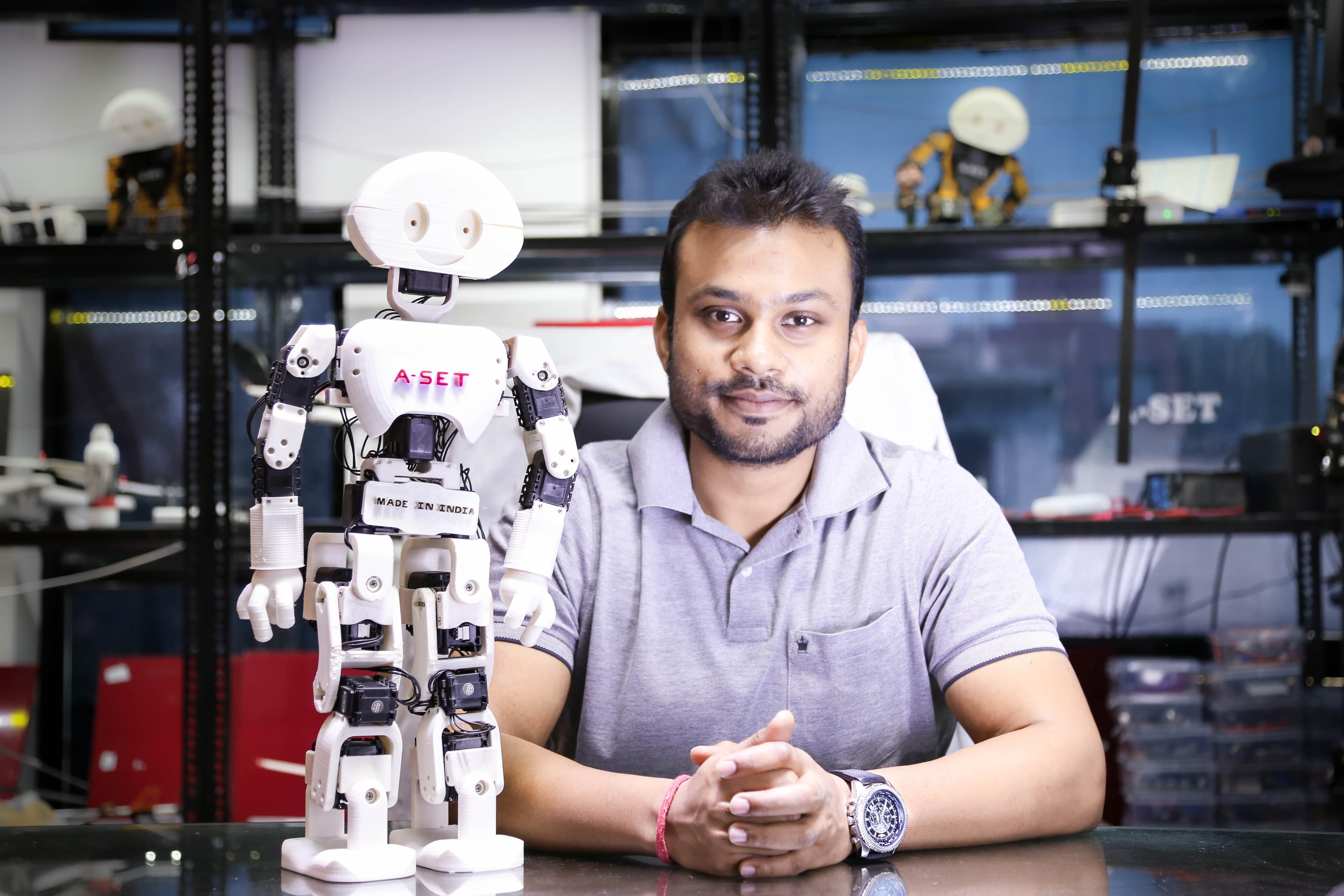
Primo umanoide indiano stampato in 3D, di A-SET Training & Research Institutes (New Delhi): alto ~60 cm, ~2 kg, 21 servo (16-21 secondo le fonti), due camere e due microfoni; cammina, fa flessioni e gioca a calcio.
Primo umanoide bipede indigeno indiano (2008), sviluppato da Team AcYut al CRIS di BITS Pilani: nelle versioni successive ~99 cm, ~7,4 kg, 28 DOF, camera RGB e IMU; cammina, sale scale e gioca a calcio in RoboCup.

Umanoide educativo costruito con materiali di scarto dal docente Dinesh Patel (Mumbai): parla 47 lingue (9 indiane, 38 straniere), usato come robot-insegnante in una Kendriya Vidyalaya.

Umanoide indiano con lip-sync sviluppato dal programmatore Ranjit Shrivastava (Ranchi), lanciato nel 2018 dopo 2 anni di sviluppo: conversazione in hindi/inglese e altre lingue con sincronizzazione labiale.
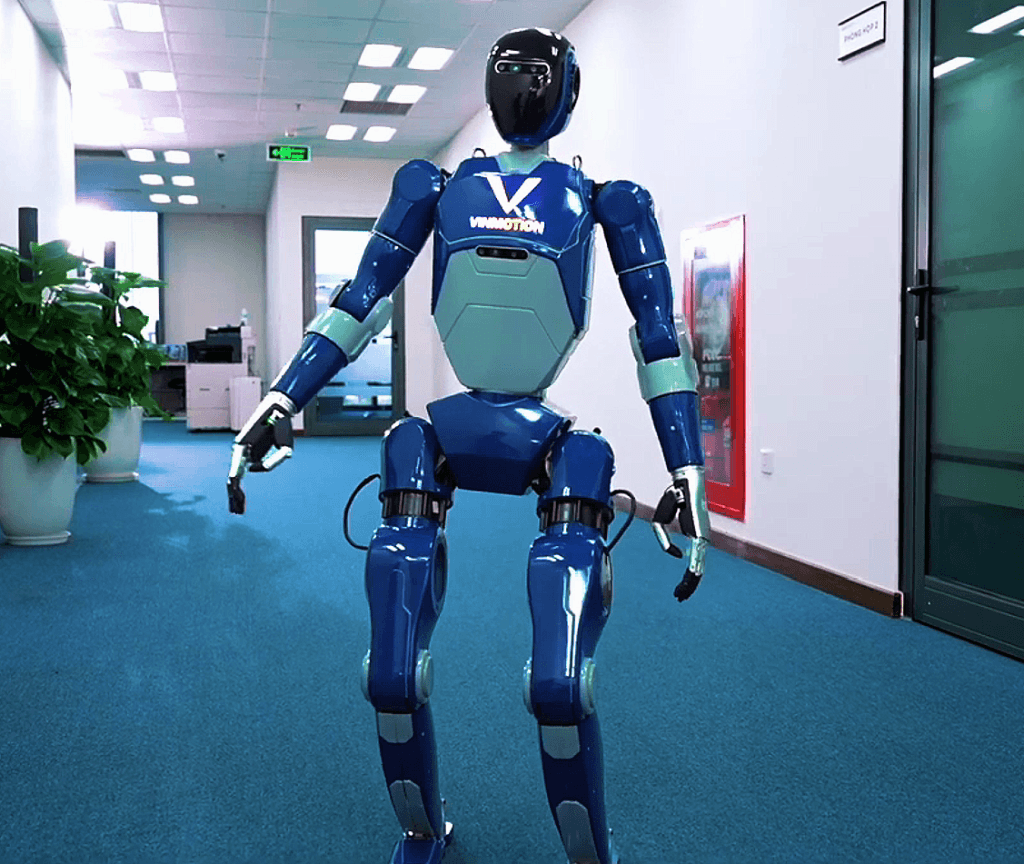
Primo umanoide bipede del Vietnam, di VinMotion (sussidiaria Vingroup, Hanoi, capitale ~39M$), introdotto a giugno 2025: camminata bipede per task industriali leggeri come material transport e ispezioni nelle fabbriche VinFast.
Umanoide bipede di seconda generazione di VinMotion (Vingroup, Vietnam), svelato a fine 2025: design rifinito, camminata human-like, solleva 40 kg con la schiena, mani a cinque dita e ricarica autonoma.

Umanoide bipede di ricerca della NUS (gruppo Prof.

Umanoide avanzato di ricerca della NTU Singapore: copia i movimenti umani, solleva pesi, sale rampe di scale e segue comandi vocali.

Famiglia di umanoidi bipedi di Singapore Polytechnic per RoboCup: cammina, corre, sale scale e calcia la palla; la variante RoboErectus Jr.
Umanoide sociale interattivo del Social Robotics Lab (ASORO) di A*STAR Singapore: capacita vocali e imitazione del movimento per la ricerca sull'interazione uomo-robot.

Umanoide bipede di ricerca personalizzabile del Mechatronics and Automation Lab della NUS, in sviluppo dal 2009: cinematica chiusa e piattaforma ad architettura aperta.

Umanoide bipede di ricerca del Mobile Robotics Laboratory della University of Queensland (nome scherzoso 'Grossly Underfunded Roo'): design antropomorfo per studi di stabilita dinamica, HRI e machine learning.

Umanoide sociale su base a ruote di Andromeda Robotics (Melbourne, CEO Grace Brown): espressioni facciali, voce e gesti, conversazione AI in 90 lingue; gia operativo in 22 strutture Mecwacare e prima linea di produzione umanoide australiana.

Umanoide bipede alto 170 cm, 68-70 kg, 43 DOF, cammina a 0,7 km/h, con stereocamere e sensori forza/coppia alle caviglie; piattaforma di ricerca non in vendita.

Umanoide bipede alto 190 cm e 98 kg, 31 DOF, tra gli umanoidi piu alti al mondo; prototipo di ricerca presentato nel 2015, non commercializzato.
Quinta generazione della serie Surena, in sviluppo presso il CAST dell'Universita di Tehran con codebase open-source pubblicato; prototipo di ricerca non in vendita.

Piccolo umanoide bipede a corpo stampato in 3D, alto fino al ginocchio, con arti articolati e testa con telecamere; piattaforma di ricerca/educazione non commercializzata.

Umanoide social a torso superiore con braccia e dita attuate, 29 DOF, progettato a basso costo per insegnare la lingua dei segni; prototipo di ricerca non in vendita.

Umanoide su base a ruote con due braccia (payload fino a 5 kg), velocita 1,2 m/s, piattaforma di sviluppo Ra-Ya; orientato ad applicazioni ospedaliere, non in libera vendita.

Primo umanoide saudita (2023), aspetto femminile alto ~162 cm con abaya, basato su LLM proprietario QSS in arabo e inglese; usato in conferenze, non in vendita.

Primo umanoide maschile saudita, presentato a DeepFest 2024 in thawb e keffiyeh, bilingue arabo-inglese, controparte di Sara; prototipo dimostrativo non in vendita.

Umanoide saudita presentato a LEAP 2025, terzo della famiglia QSS dopo Sara e Mohammad, progettato per comunicare in arabo e piu lingue; non in vendita.

Umanoide impiegato come addetto del dipartimento IT dell'ospedale KFSH&RC, con AI/ML e interazione in arabo e inglese, riconoscimento facciale; operativo internamente, non in vendita.

Umanoide di servizio su base mobile omnidirezionale con torso elevabile e braccia, sviluppato dal 2006 alla UNAM; pluripremiato (RoboCup, IROS), piattaforma di ricerca non in vendita.
Primo umanoide bipede messicano (CINVESTAV Guadalajara), alto 105 cm e 15 kg, 40 servo/DOF, con riconoscimento facciale; prototipo di ricerca a basso costo non commercializzato.

Primo umanoide costruito localmente in Sudafrica, torso a altezza piena con braccia 6-DOF e mani a cinque dita (38 DOF totali), teleoperabile da remoto; prototipo torso (gambe in sviluppo), non in vendita.
Umanoide femminile alto ~1,8 m (6 piedi) che parla 8 lingue con accento nativo, con consapevolezza di posizione, presa e terreno; lanciato in Nigeria nel 2022, non in vendita.
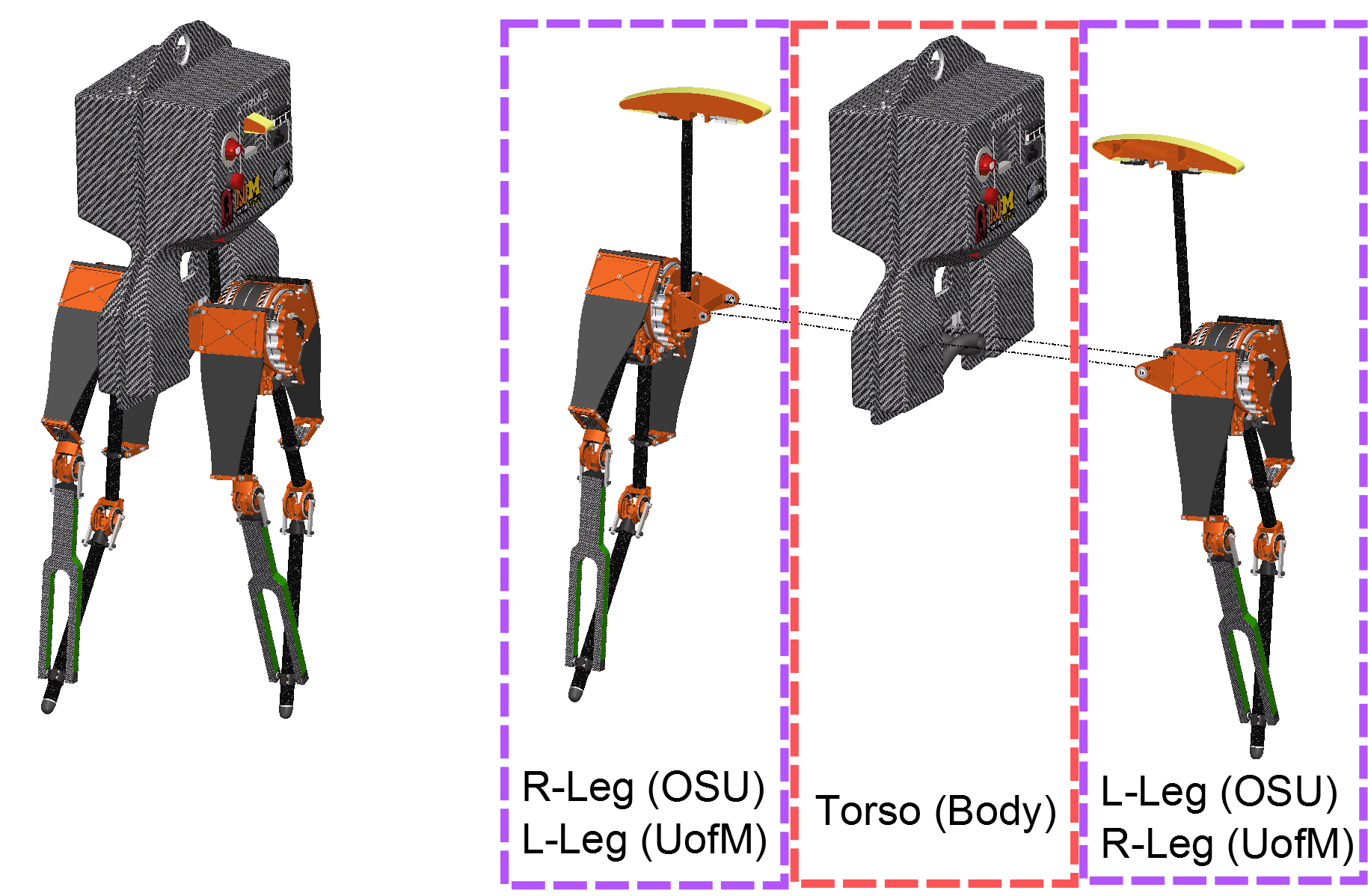
Bipede spring-mass 3D tether-free dell'OSU Dynamic Robotics Lab, gambe con molle in fibra di vetro; primo robot a riprodurre la dinamica del passo umano.
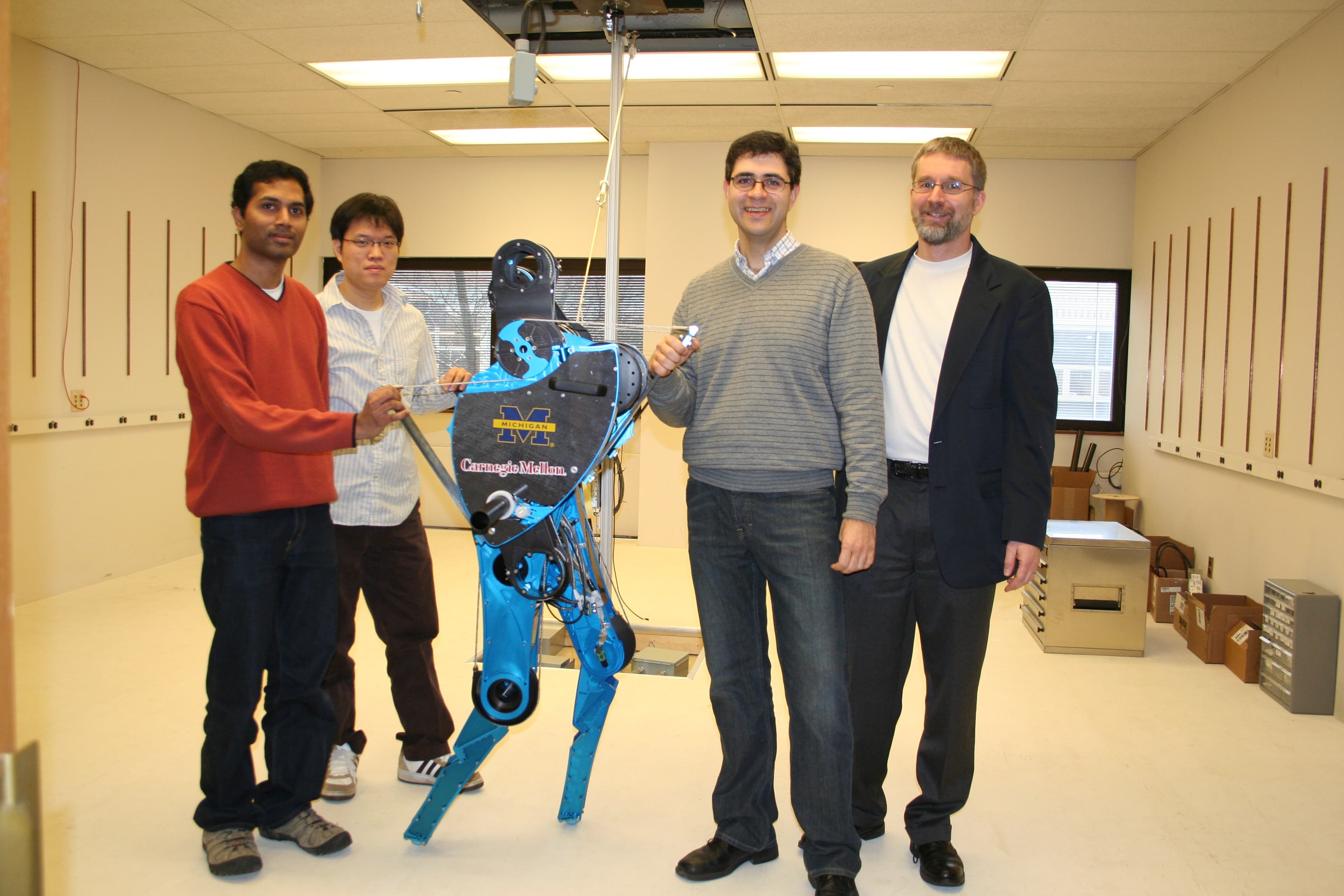
Bipede planare a gambe con ginocchia dell'Università del Michigan (Grizzle), 65 kg, fino a 3,6 m/s; tra i robot a due gambe con ginocchia più veloci, sospeso per il 40% del passo.

Bipede planare a gambe dell'AMBER Lab (A&M Bipedal Experimental Robotics), gait derivato da dati umani; piattaforma di ricerca su locomozione umano-ispirata.
Umanoide bipede dell'AMBER Lab/SRI, <100 kg, cost of transport ~1,5; ha vinto la Endurance Challenge del DARPA Robotics Challenge 2015 camminando 3+ ore con una batteria.

Umanoide bipede idraulico Boston Dynamics/DARPA che cammina, striscia e fa flessioni, suda e regola temperatura per testare DPI chimici; precursore di Atlas.
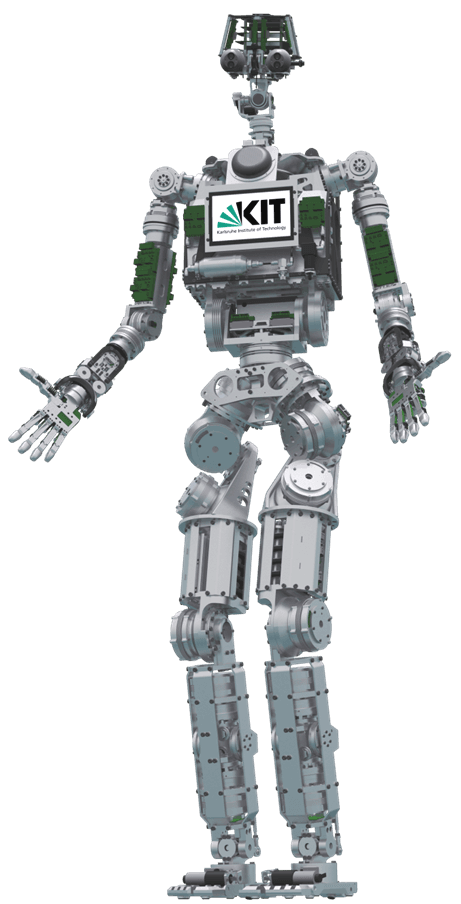
Umanoide bipede torque-controlled del KIT con 63 DOF, introdotto nel 2012; piattaforma di ricerca ad altissima ridondanza cinematica.
Umanoide bipede del TUM da 180 cm, 25 DOF, ~55 kg, gambe ridondanti a 7 DOF e costruzione ultraleggera; piattaforma per camminata ad alta velocità.

Bipede planare a 5 link e 4 attuatori del CNRS, sottoattuato e senza piedi; piattaforma storica per dimostrare camminata e corsa asintoticamente stabili.

Umanoide bipede del JSK Lab (Univ.

Android iper-realistico con pelle in silicone, oltre 600 espressioni facciali, braccia mobili a 12 DOF ciascuna e manipolazione fino a 1 kg; in produzione di serie..

Umanoide commerciale su base a ruote, ~120 cm, braccia articolate, touchscreen 11,6 pollici, navigazione SLAM con LiDAR; cloud-connesso e disponibile..

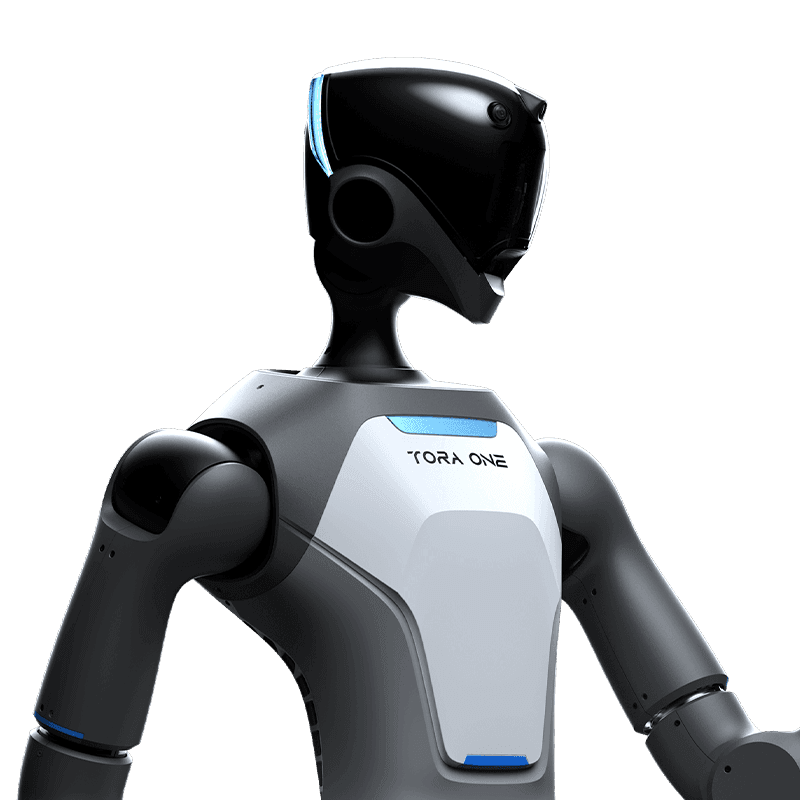
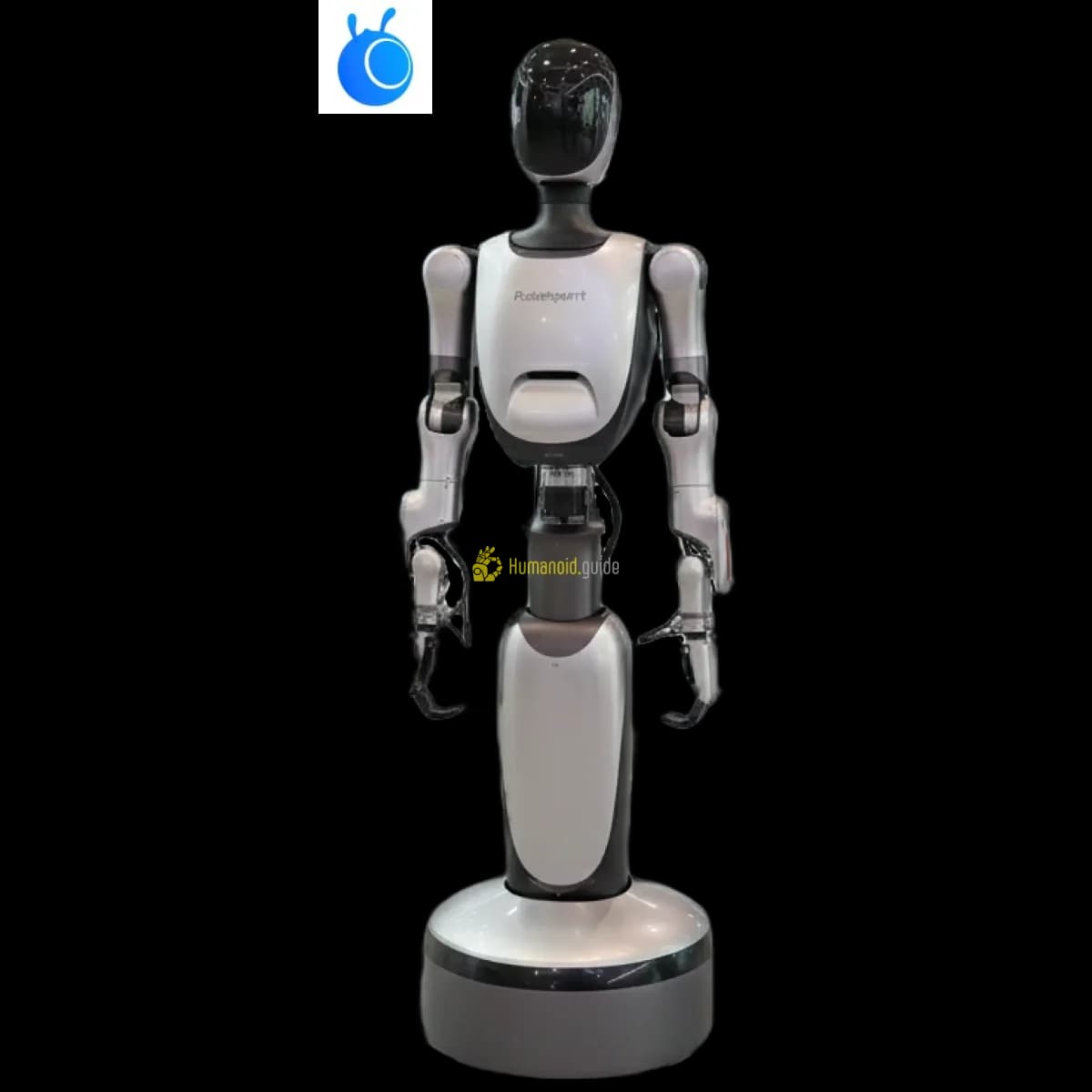
Umanoide a grandezza naturale su base a ruote, 176 cm, 44 DOF, payload 15 kg, mani destre industriali di 4a generazione; Tecnologia emergente..

Umanoide iper-realistico su base a ruote con pelle sintetica, sistema facciale a 17 motori per micro-espressioni, 15 lingue e 147 dialetti, AI a bordo; pieno-corpo ~175.000 USD.

Umanoide modulare open-source con motori P-Series Dynamixel, micro-camere negli occhi e corpo smontabile da valigia; integrabile con ChatGPT.

Androide sanitario su base a ruote, ~152 cm, oltre 48 muscoli facciali simulati, camera termica sul petto, parla inglese/mandarino/cantonese; valore ~150.000 USD.

Piccolo umanoide programmabile da 14 pollici (~36 cm), volto in materiale skin-like con decine di espressioni, tracking facciale, programmabile via Blockly/Python su Raspberry Pi..

Manipolatore mobile umanoide su base a ruote, braccio con payload fino a 3 kg, TTS multilingue, riconoscimento facciale e vocale, mapping e path planning; configurabile e disponibile..

Umanoide di servizio su 3 ruote omnidirezionali, 85 cm e 19 kg, 54 sensori, touchscreen 10,1 pollici, integrazione Amazon Alexa; cloud-enabled e disponibile..

Umanoide domestico su base a ruote, 100 cm e 30 kg, riconoscimento volti e voce, ~10.000 parole, sensori a ultrasuoni e infrarossi; commercializzato in Giappone dal 2005, ora fuori produzione.
Umanoide sociale da tavolo, 63 cm e 5 kg, 12 DOF nel busto superiore, volto a schermo per emozioni, camera 3D e array microfoni, Intel NUC con Ubuntu/ROS; disponibile..

Umanoide sociale su base a ruote, 105 cm, 24 motori e 10 DOF nelle spalle, 6 microfoni, OS Android, espressioni facciali e dialogo vocale; ~2.000-3.900 USD.

Cobiot di servizio su piattaforma mobile autonoma con touchscreen 10 pollici, navigazione indoor smart, eredita interattivita da Pepper e NAO; in leasing a ~800 USD/mese.

Umanoide di servizio come greeter, mosso dal modello VLA proprietario KOM2.0 per il settore servizi, interazione in linguaggio naturale e azioni antropomorfe; in deployment pilota.

Umanoide sociale da ~61 cm che cammina, muove testa e braccia e riproduce gran parte delle espressioni facciali umane; usato con il curriculum Robots4Autism, disponibile..

Umanoide storico NASA/DARPA (1997-2006) a busto, 43 DOF con due braccia 7-DOF e mani destre a 5 dita per task da astronauta in teleoperazione.
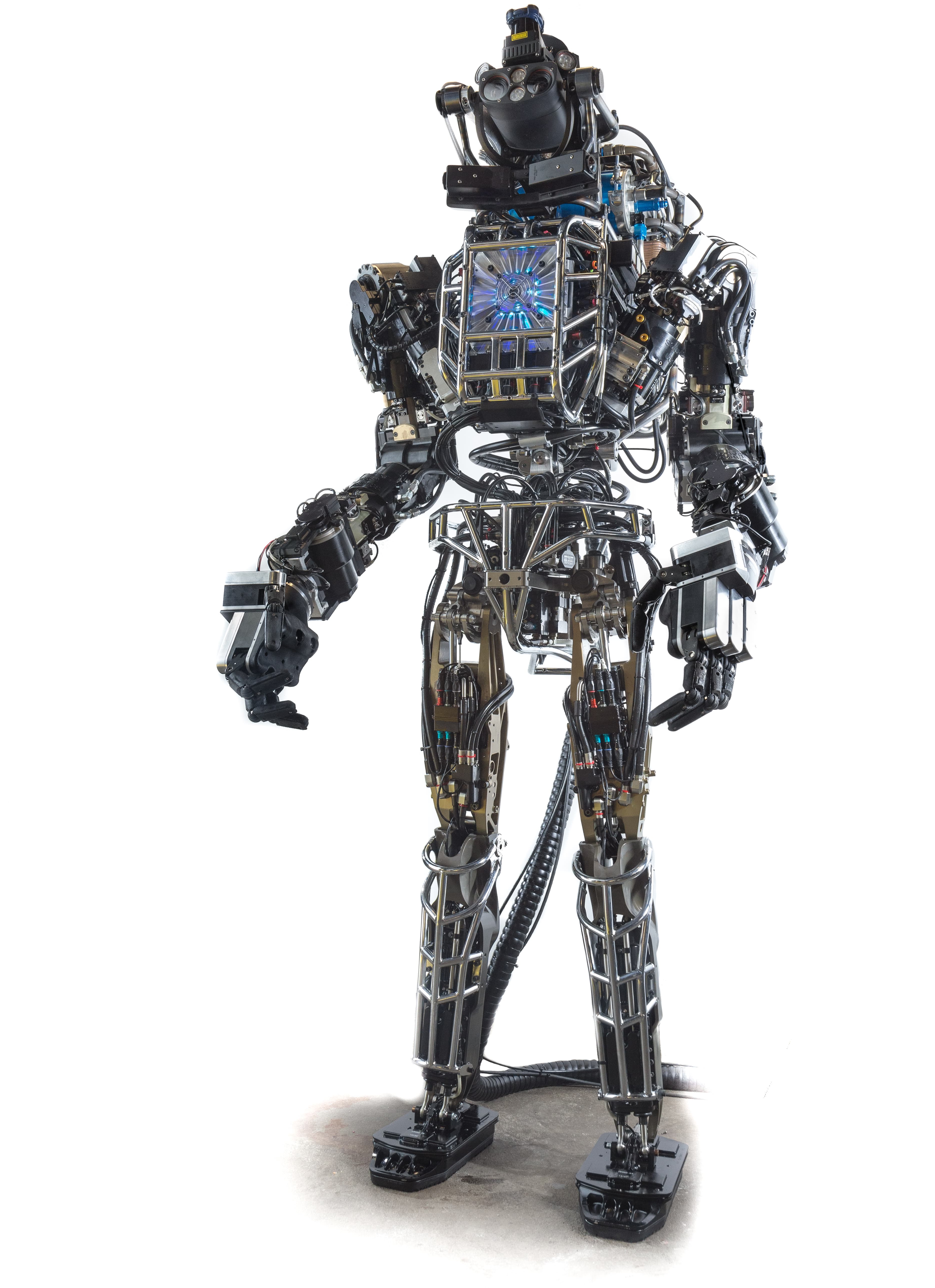
Umanoide bipede idraulico storico Boston Dynamics per la DARPA Robotics Challenge (2013), alto ~188 cm, ~150 kg, 28 DOF idraulici con testa sensoriale e alimentazione/computer in tether.
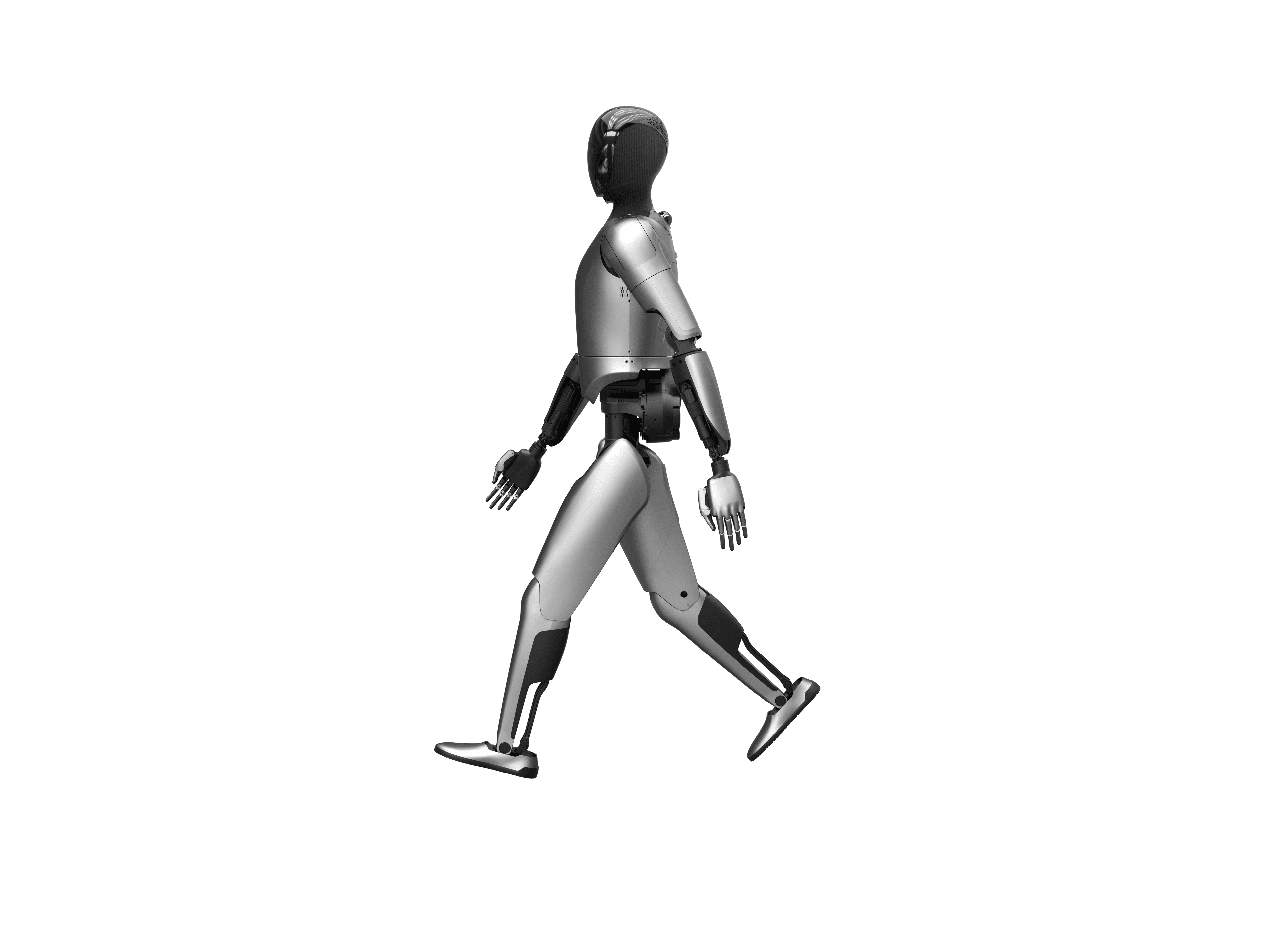
Umanoide bipede general-purpose alto 173 cm, mani a 22 DOF, payload 20 kg; produzione interna avviata, primi clienti commerciali attesi fine 2026.

Primo umanoide bipede di Figure AI, alto ~170 cm con payload 20 kg, testato in pilota BMW; piattaforma di prima generazione superata da 02/03.

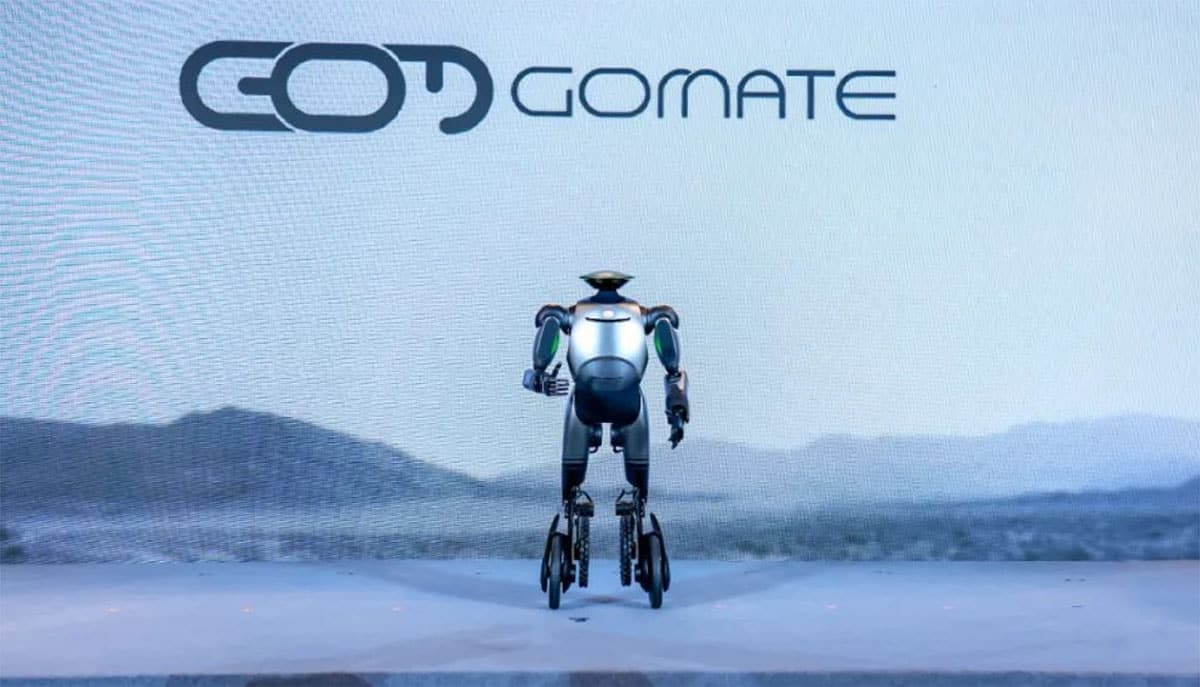
Robot general-purpose con torso e braccia su base mobile, mosso dal foundation model GENE-26.5; design che rompe la forma umanoide tradizionale, produzione targettizzata fine 2026.

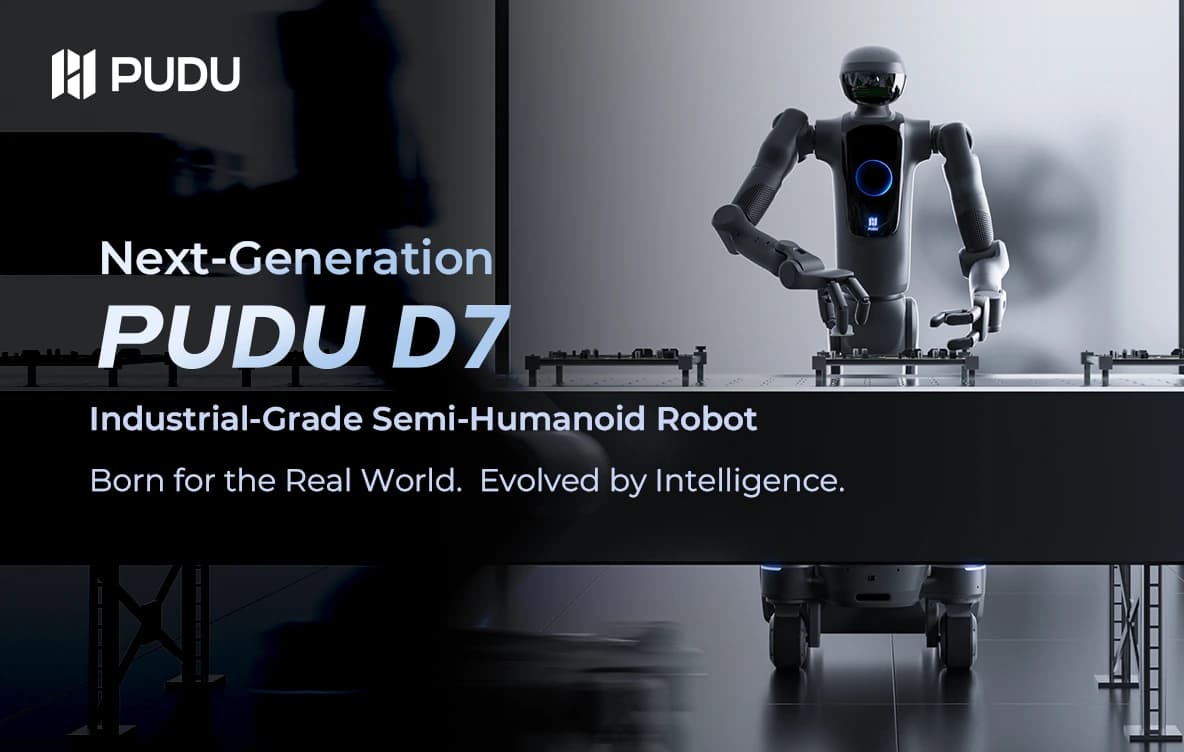
Primo umanoide industriale all-weather con rating IP66, alto 175 cm e payload 20 kg, operativo tra -20 e 55 gradi; 275 TOPS di calcolo.

Umanoide domestico stazionario con braccia doppie a 6 DOF e altezza regolabile fino a ~170 cm, piega il bucato in 30-90 minuti; disponibile a 7.999 dollari o in abbonamento.

Umanoide domestico su ruote alto 170 cm e 77 kg, con braccia che raggiungono 2,1 m in verticale, addestrato via Skill Capture Glove; beta Founding Family prevista fine 2026.
Umanoide bipede alto ~180 cm e 52-55 kg con velocita di punta ~12 km/h, vincitore della prima mezza maratona per umanoidi; piattaforma 'Hui Si Kai Wu'.

Umanoide alto ~1,3 m e ~34 kg con locomozione duale bipede-ruote e navigazione propriocettiva senza camere; suite sensori 3D LiDAR e RGB-D.
Umanoide bipede agile alto 125 cm e 25 kg con 28 DOF, dotato di LLM, speaker hi-fi e doppia camera HD; prezzo ~5.500 dollari.
Umanoide domestico su base a ruote alto 165 cm e ~70 kg con 44 DOF, customizzazione del RobotEra Q5; ancora teleoperato, non pienamente autonomo.

Androide umanoide alto 175 cm e 30 kg con pelle in silicone ed espressioni facciali realistiche, sviluppato con USST; primo robot ammesso a un dottorato.

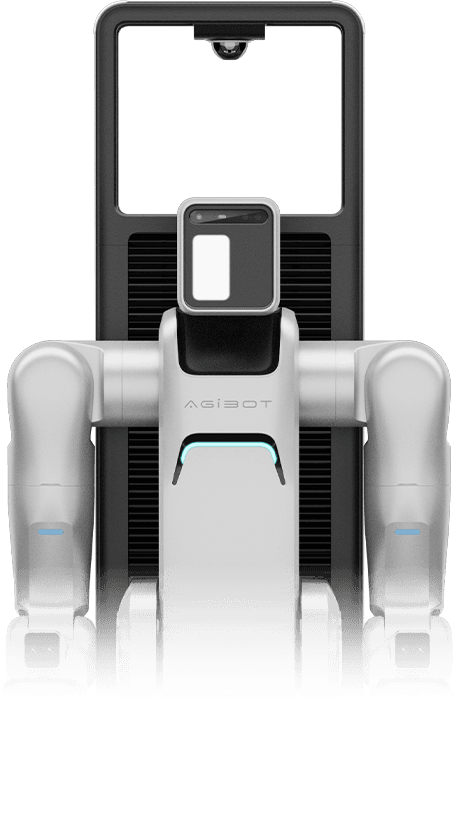
Umanoide full-size dual-arm su chassis a tre ruote, raggio verticale fino a 2 m; versione R1 Pro con 26 DOF, payload 10 kg e Jetson AGX Orin (200 TOPS)..
Umanoide su ruote a doppio braccio alto 1,6-1,75 m e 110 kg con 34 DOF, mosso dal modello AI proprietario di Ant; gia in produzione e consegnato a clienti.

Umanoide bipede compatto alto 107 cm e 22,7 kg con 29 DOF, esterni morbidi e limiti di coppia conservativi; acquisito da Amazon (Personal Robotics Group) nel 2026.

Androide teleoperato copia di Hiroshi Ishiguro con 53 DOF, riproduce movimenti del busto ed espressioni facciali tramite attuatori pneumatici; piattaforma di ricerca.
Androide femminile teleoperato con 12 attuatori pneumatici per espressioni facciali naturali, ampiamente esposto; in vendita a ~10 milioni di yen.

Androide conversazionale autonomo con espressioni facciali e gesti umani, capace di backchanneling e ascolto attentivo; piattaforma di ricerca ERATO.

Robot companion teleoperato minimalista in vinile morbido che trasmette presenza e movimenti di un operatore remoto, usato in terapia per anziani.

Serie pionieristica di androidi lifelike alta ~158 cm con pelle in silicone e fino a 47 punti di articolazione ad attuatori pneumatici; venduta a ~110.000 dollari.

Androide replica del Prof.

Androide sociale modellato sulla Prof.ssa Thalmann, con pelle morbida, espressione di emozioni e memoria delle conversazioni; fabbricato da Kokoro.

Umanoide di servizio mosso dalla piattaforma NVIDIA Cosmos, con persona interattiva e autonomia sociale dimostrata dal vivo a CES; per hospitality.
Androide espressivo con pelle nanotech Frubber e attuatori per oltre 60 espressioni facciali, focalizzato su interazione e percezione; piattaforma di servizio.

Androide a busto (testa e spalle) con 32 motori facciali per 64 espressioni, costruito da Hanson per la Terasem di Martine Rothblatt; replica di Bina Aspen.
Robot artista iper-realistico su corpo RoboThespian con testa Mesmer di Engineered Arts; disegna e dipinge tramite camere negli occhi e braccio robotico (non cammina).

Piattaforma di ricerca umanoide torso-up con braccia, torso rigido e attuatore di vita, rivestita di materiali soft e sensori tattili per manipolazione a tutto corpo; senza gambe.

Umanoide sociale da tavolo alto 28 cm con torso, testa e due braccia per gesti, sviluppato con Osaka University; prezzo ~100.000 yen.
Umanoide bipede alto 175 cm e 53 kg con 49 DOF e mani SkillHand con camera sui polpastrelli; 200 TOPS, payload 5 kg per braccio, prezzo sotto i 27.400 dollari.
Umanoide bipede idraulico alto circa 150 cm, ~28 DOF, celebre per backflip e parkour; piattaforma di ricerca ritirata nel 2024.
Umanoide bipede alto 148 cm e 95 kg, vincitore dei DARPA Robotics Challenge Trials 2013, poi acquisito da Google.

Umanoide bipede alto 1,78 m, 34 DOF, attuatori lineari series-elastic custom; piattaforma DARPA Robotics Challenge (Team THOR/VALOR).
Umanoide bipede force-controlled alto circa 1,78 m con attuatori series-elastic; ha percorso i 61 m di terreno sciolto ai DARPA DRC Finals 2015.
Primo umanoide statunitense full-size autonomo (2010), alto 1,52 m con 36 motori elettrici e ~36 DOF; campione RoboCup.

Mini-umanoide open-platform alto 45 cm con 20 DOF, prodotto e venduto da ROBOTIS per ricerca ed educazione..

Umanoide life-size alto 188 cm ad alta potenza per disaster response, cammina su due o quattro arti e resiste a ribaltamenti; piattaforma DARPA DRC.
Umanoide muscolo-scheletrico alto 1,70 m e 56 kg con 108 motori, famoso per 'sudare' deionizzando acqua per raffreddarsi (IROS 2016).
Umanoide muscolo-scheletrico tendon-driven con ~100 strutture tendine-muscolo e circa 60 DOF, spina dorsale flessibile; precursore di Kenshiro.

Umanoide muscolo-scheletrico anatomicamente accurato alto 1,58 m e 50 kg con circa 160 muscoli, taglia di un ragazzo di 12-13 anni (2012).

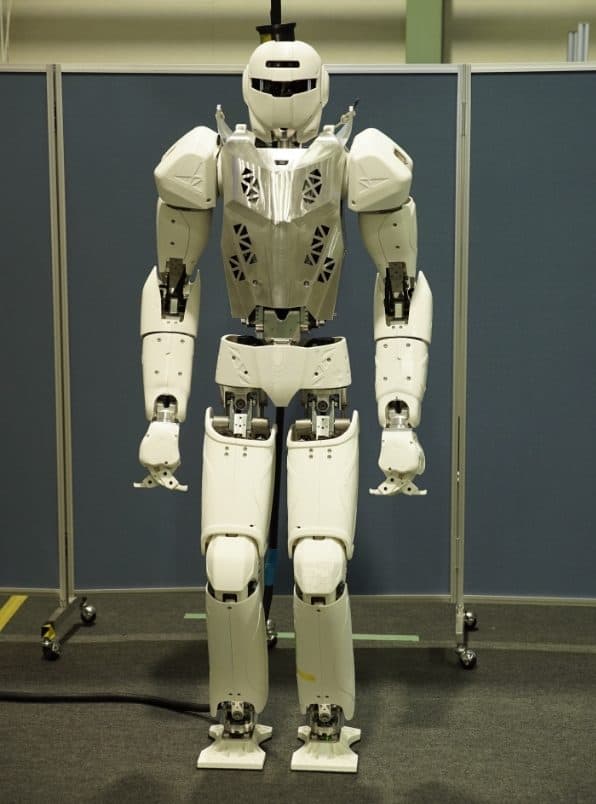
Primo umanoide della serie Humanoid Robotics Project (2000), alto 160 cm e 130 kg, basato sull'hardware Honda P3.

Versione originale di ASIMO (2000) alta 120 cm e 43 kg, progettata per operare interruttori e maniglie negli spazi umani; pietra miliare della robotica umanoide.

Umanoide human-symbiotic (2007) con busto, doppie braccia e mani antropomorfe compliant su base omni-direzionale a ruote, per assistenza e cura.

Androide femminile (2005) con 42 attuatori pneumatici e 42 DOF, reagisce autonomamente ai visitatori; precursore di Geminoid.

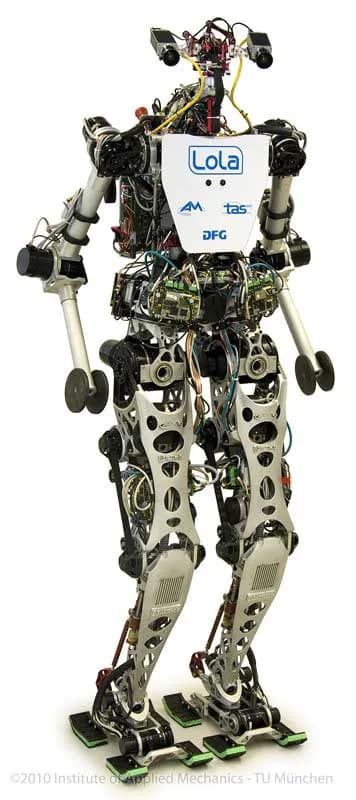
Umanoide bipede autonomo (2003) alto 1,80 m con gait antropomorfo dinamicamente stabile, cammina fino a 2,4 km/h; predecessore di LOLA.

Piattaforma bipede cavalcabile alta 139 cm (199 cm con cockpit), 12 DOF, payload fino a 100 kg; versione scalata della parte inferiore di HUBO.

Umanoide bipede network-based (KIST + Samsung) alto circa 150 cm e 62 kg, ottiene intelligenza dalla rete; serie Mahru/Mahru-R.

Busto antropomorfo teleoperato per assistenza spaziale, solleva fino a 10 kg a terra, controllato da guanti con force-feedback; precursore di FEDOR.
Serie di umanoidi bipedi accademici dal 2002 (es.

Umanoide full-size capace di correre, vincitore della prima mezza maratona per robot di Pechino (2025) con postura da podista; piattaforma statale recente.
Umanoide su ruote (wheeled humanoid) alto 80 cm e 14 kg con meccanismo gamba-ruota, viaggia a 6 km/h, mappatura e riconoscimento vocale a distanza (2007).
Carebot dal volto d'orso con busto e braccia umanoidi, solleva persone fino a 80 kg; ROBEAR (2015) pesa 140 kg con attuatori a basso rapporto di riduzione.

Umanoide TeenSize da calcio RoboCup (2008) con 13 DOF attivi e cinematica parallela nelle gambe, vincitore di piu edizioni TeenSize.
Serie di umanoidi bipedi accademici (THBIP-I con 32 DOF; THBIP-II alto 75 cm, 18 kg, 24 DOF) per ricerca su locomozione e controllo.

Grandi umanoidi bipedi indipendenti (es.
Robot bipede sperimentale (1988) alto circa 1,68 m mosso da 28 'air-muscle' pneumatici; oggi al Science Museum di Londra.
325robot umanoidi in catalogo · Early-access / Pilota industriale